2025阿木实验室的年度关键词是?
2025年,阿木实验室把“无人系统研发”这件事做得更完整:从开源工具链到标品平台,从仿真闭环到实飞验证,从单机能力到集群协同,从依赖GPS到面向拒止环境的工程解法,形成了覆盖“感知—定位—规划—控制—通信—部署”的全栈技术闭环。我们沉淀的不只是单点算法或演示效果,而是一套可复现、可工程化交付的无人系统整体方案。
但要用一个词概括这一年,我们先卖个关子:答案放在文末。
识别 | SpireCV
SpireCV
视觉识别不是“模型跑通”就结束,真正的价值在于:能稳定接入机载、能被任务链路调用、能和控制/规划协同。这一年我们在视觉识别上做的核心不是堆算法,而是把视觉能力做成可组合、可复用、可集成的工程组件。
SpireCV 2.0引入节点式编程,把识别/推流/保存/控制协议等拆成独立节点,开发者可以像搭积木一样构建视觉工作流。
配套的SpireMS轻量消息系统,解决跨系统、跨语言、跨环境的数据分发与集成痛点,让视觉模块更容易进入“任务主流程”。
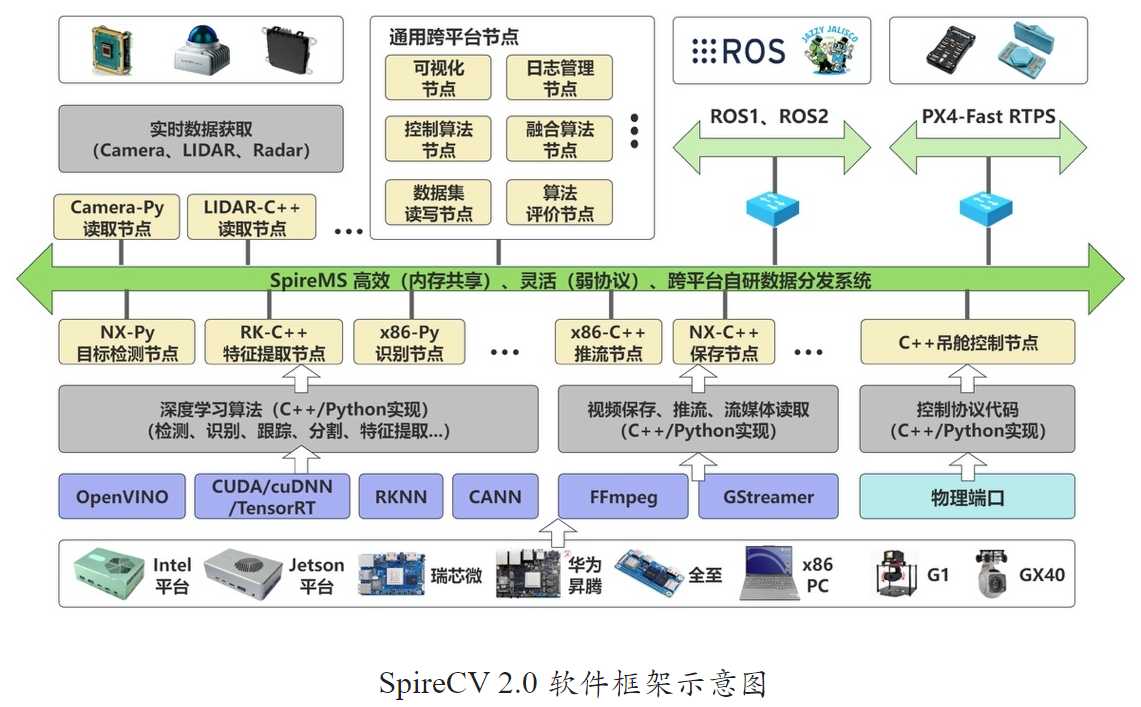
你可以理解为:把“看见目标、跟踪目标、把结果输出给上层动作”这条链路,变成可复用的标准件,而不是一次性的Demo。
感知 | 拒止环境巡检
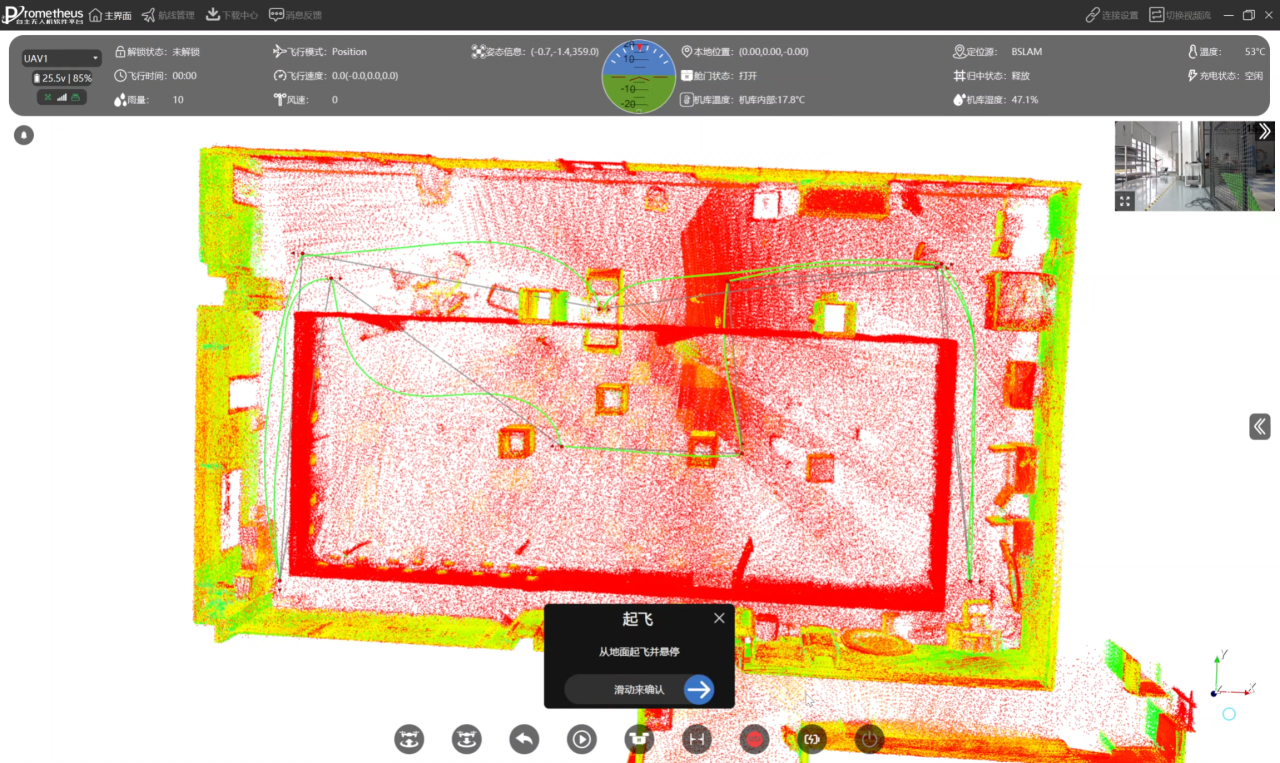
2025年,阿木实验室在定位与建图上取得了关键技术突破:无人机在弱光、遮挡、狭窄空间、密林、黑夜等严苛复杂环境下,仍能保持稳定定位与姿态控制,实现持续自主飞行;在 GPS拒止环境中也可完成巡检任务,使作业从“人工跟飞/随时接管”升级为无人值守的流程化运行。
这背后的核心技术突破是多传感器融合感知:将视觉、IMU、激光雷达等多源信息在统一框架下深度融合,利用传感器间的互补性提升鲁棒性。
视觉在细节与特征上提供约束、IMU保证高频运动估计的连续性、雷达在弱纹理或光照不佳场景提供几何稳定性;同时通过融合建图与重定位能力,降低漂移、提升回环一致性与跨场景稳定性,为后续规划与控制提供可靠底座,最终支撑拒止环境下的稳定巡检与自动回归。
规划 | 全局路径规划
在融合定位与三维建图底座之上,通过全局三维建模生成可执行的巡检航线,并在全局视角下进行航线最优规划(路径更短、风险更可控、约束更清晰)。更关键的是,航线支持长期精准复用:同一路线可按周期稳定复飞,显著减少重复标定与反复设置的成本,让巡检从临时任务升级为可持续的自动化流程,整体效率与一致性明显提升。
控制 | 飞控兜底
在各种复杂严苛环境中,控制层最关键的不是“能飞”,而是异常可控、接管可控、恢复可控。为此,我们在飞控兜底上做了两项关键工程突破:
优化扩展卡尔曼滤波(EKF):在“视觉主导”的定位场景下,对气压计实施智能融合(基于测量质量/一致性自适应参与融合),在增强高度与姿态估计鲁棒性的同时,不牺牲定位精度,显著降低复杂工况下的估计抖动与突变风险。
视觉异常独立策略 + 闭环处置链路:我们将“视觉异常”从通用异常中单独拆出,形成更贴合巡检场景的分级策略,并补齐完整闭环:紧急动作(刹停/悬停/保守高度策略) → 飞手接管 → 防回灌(隔离异常视觉输入与状态污染,恢复后再安全重启/重融合)。
相比PX4默认将视觉异常并入通用异常的处理方式,这种拆分策略在工程可控性与场景适配性上更强:既能在异常发生时更快“稳住”,也能在接管与恢复阶段避免状态估计被污染,保证后续任务可回归、可复盘。
仿真 | ProSim
为了解决无人系统研发里“联调周期长、真机试错成本高、仿真与实飞割裂”的老问题,阿木实验室在 2025 年持续完善 ProSim(PrometheusSim)仿真平台。对仿真架构、开发体验、视觉真实感进行了全链路重构。
底座更稳:统一底层环境统一迁移至 Ubuntu 22.04 LTS,同时支持Windows11+WSL2一键部署,兼顾易用与原生开发体验;
通信更快:全面ROS2 DDS 原生化,去掉ROS1桥接“翻译层”,多机通信延迟显著降低,并支持生命周期、QoS 等工程能力;
视觉更真:UE5.2 引入 Lumen/Nanite,使光照与大场景更接近真实,为视觉SLAM/检测与避障训练提供更可信的仿真环境。
接口开放:聚焦开发者最频繁调用的底层控制接口,将四类基础控制模式全部开放,并标准化为ROS2 Topic/Service接口。
从“环境配置”到“首次飞行”仅需30分钟。ROS2原生架构 + UE5.2 物理级视觉+一键部署体验,把高成本试错前置到屏幕上,把仿真验证做成可持续的研发闭环。
标品 | 覆盖科研和行业
当链路能力沉淀到一定程度,才有资格谈All in One。2025年我们把技术能力做成“可组合、可交付”的标准化平台:
- 面向科研开发者:SU17科研版无人机高度集成自研飞控、机载计算机、四目视觉SLAM与图传模块,并搭载 Prometheus 自主无人机软件,支持多种飞行控制、目标识别跟踪与三维路径规划。平台可选配MID360三维激光雷达,实现 Fast-LIO 等三维激光 SLAM,并结合 EGO-Swarm 等规划算法完成复杂环境下的三维建图与动态避障;配套 Prometheus 专业地面站,帮助科研团队快速开展智能算法验证与二次开发迭代。
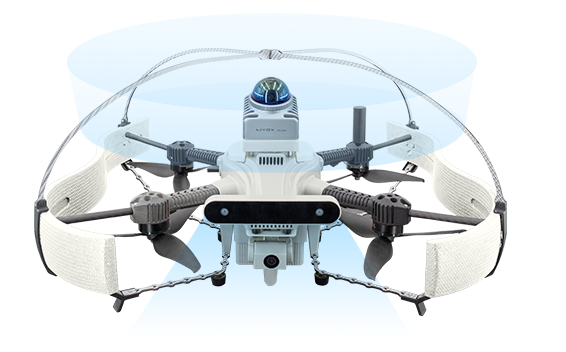
- 面向行业应用者:BO1先锋版无人机聚焦GPS 拒止环境的室内巡检,通过视觉、激光与 IMU 等多源融合实现稳定自主导航与数据采集,即使在弱光、纹理单一、空间狭窄等苛刻场景也能保持可靠飞行;配套智能机库支持自动起降、自动充电与任务一键下发,让巡检从“一次性任务”升级为可重复、可追溯的日常作业。

年度关键词
2025 阿木实验室的年度关键词,就两个字:省心**。**
你可能会觉得这不像技术词,但它最准确。因为我们这一年的所有突破,本质上都在做同一件事:把无人系统研发里最折腾、最耗时间的环节,变成稳定、可复现、可交付的默认选项。
我们把识别、感知、全规划、控制、仿真到实飞,串成一条完整闭环的技术链路;把“复杂环境可用”与“拒止环境可巡检”做成工程常态;再把这些能力沉淀为All in One标品,既服务科研开发者的快速验证与迭代,也支撑行业场景的流程化、无人值守运行。而你只需要专注算法、业务、交付、真正做到上手即用。


