过年回家偷偷努力,无人机实景仿真快速上手,ProSim免费开放(ROS2+UE5加持)
2024年,Prosim首次亮相,为Windows开发者打开了无人机仿真的便捷之门。2025年,我们选择“归零”再出发—将整个技术栈迁移至现代机器人开发的前沿。
今天,我们正式发布Prosim ROS2原生版,基于Ubuntu 22.04 LTS 系统环境,深度集成ROS2 Humble,并搭载虚幻引擎5.2(UE5.2)渲染核心。这不是一次简单的版本升级,而是对仿真架构、开发体验、视觉真实感的全链路重构。
三大核心跃迁
系统底座
我们终于将底层环境迁移至Ubuntu 22.04 LTS—当前最稳定、生命周期最长的Linux发行版之一。
WSL2用户亦可无缝升级:一键脚本同时配置Windows+WSL2 Ubuntu22.04保持“Windows友好”的同时,享有纯正的Ubuntu开发体验。
为后续集成ROS2 Humble及最新PX4 Autopilot提供了最坚实的底座。
通信框架
告别ROS1桥接的“翻译层”,Prosim已完成ROS2 Humble的原生化适配。
完全原生架构:所有仿真节点、控制接口、传感器话题均基于ROS2 DDS实现,多机通信延迟降低50%以上。
未来就绪:完整支持ROS2组件生命周期、参数服务、QoS策略,为集群协同、实时性任务铺平道路。
视觉引擎
我们从UE4.27跨越至UE5.2,将无人机仿真的视觉逼真度推向“物理级”新高度。
Lumen全动态全局光照:光线实时反弹,室内外光照变化、阴影细节达到影视级画质,视觉SLAM/目标检测算法的仿真置信度提升。
Nanite虚拟几何体:直接导入数亿面的实景三维模型,城市级、森林级大场景流畅运行,为密集障碍环境下的避障算法提供训练场”。
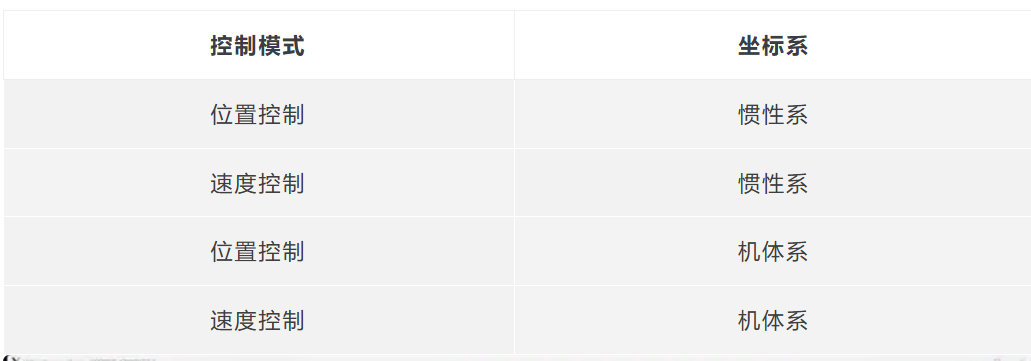
基础控制功能
四大模式,指哪飞哪
此次升级聚焦开发者最频繁调用的底层控制接口,将四类基础控制模式全部开放,并标准化为ROS2 Topic/Service接口:
开发者体验
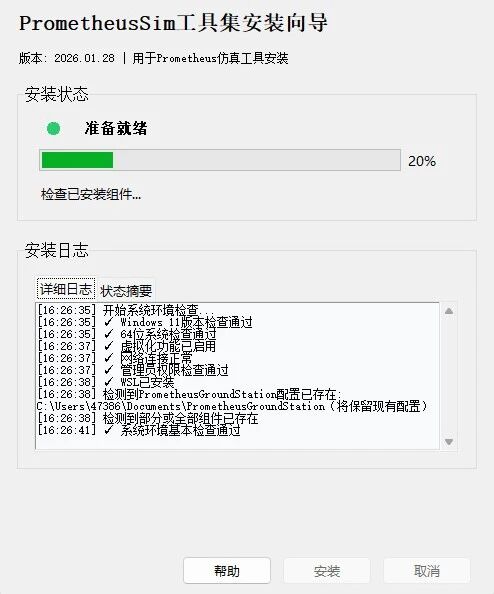
从“环境配置”到“首次飞行”仅需30分钟。
我们深知复杂的环境配置是仿真落地的最大阻碍。此次升级后,Prosim提供一键部署方案:
Windows 11 + WSL2 Ubuntu 22.04
一键脚本自动配置WSL2发行版为Ubuntu 22.04,并完成全部环境部署。
仿真前端(UE5.2)运行于Windows,PX4/ROS2节点运行于WSL2,数据吞吐量较旧版大量提升。
资源速递
关注公众号,后台私信ProSim获取安装包及相关资料。
扫码添加小助手,进入ProSim学习交流群:

如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:
bbs.amovlab.com
有工程师亲自解答
10000+无人机开发者和你共同进步!


