三环控制让吊载无人机消摆更稳,轨迹更准|奖学金论文分享
在无人机空中运输中,绳索吊载因为灵活、适用场景多而被广泛使用,但它也有个bug:载荷一摆,遇到风扰或航点切换时更容易被放大,轻则精度下降,重则影响稳定性。针对这一挑战,西南交通大学郑志远等人在《IEEE Transactions on Intelligent Transportation Systems》中发表论文,从“执行受限”的真实工程问题出发,提出了一套更适用于实飞的控制框架,并在实验中验证了强扰动与轨迹切换场景下的效果。
凭借这一研究郑志远同学获得阿木实验室校园奖学金二等奖:**5000元**。2026年的奖学金活动也在紧锣密鼓筹划中,我们很快会公布细则,想冲奖的同学可以开始准备了。
01 研究背景
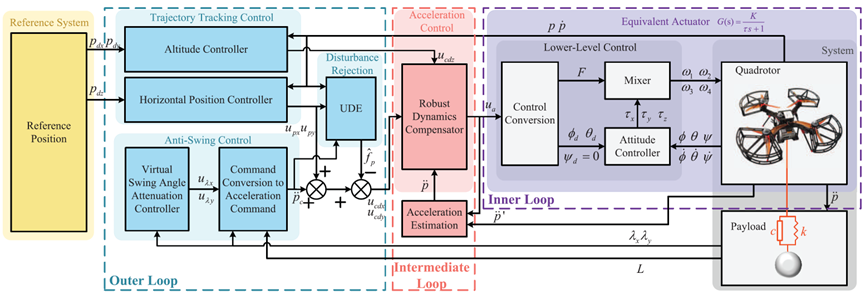
消摆控制往往需要较快的机动动作,而在实际工程中,经典四旋翼“双环级联”控制框架(外环位置/消摆+内环姿态)未必能把这些指令有效执行,其关键原因在于内环执行带宽并不理想。为此,论文提出了一种融合不确定性与扰动估计器(UDE)的反步控制分层框架。
该框架由三层回路组成:外环的轨迹跟踪与消摆控制器、内环的姿态控制器仍沿用传统设计;更关键的是在两者之间引入中间控制环,并基于实验验证的执行机构模型设计鲁棒动态补偿器(RDC),用于扩展四旋翼的有效执行带宽,从而在工程上更好地满足外环对带宽的需求。
论文进一步采用 Lyapunov 方法证明闭环系统稳定性,并结合奇异摄动理论对系统性能进行分析,最后通过对比仿真与实飞实验验证了该方法的可行性与有效性。
02 技术亮点
三环控制结构
- 在经典四旋翼级联控制框架的外环与内环之间引入了一种新的鲁棒动态补偿器(RDC)模块,构建了一种全新的三环控制结构。该结构能够在无需重新设计内环控制器的前提下,系统性地提升内环的执行带宽,从而有效保障外环控制性能。
一阶辨识 + UDE反步
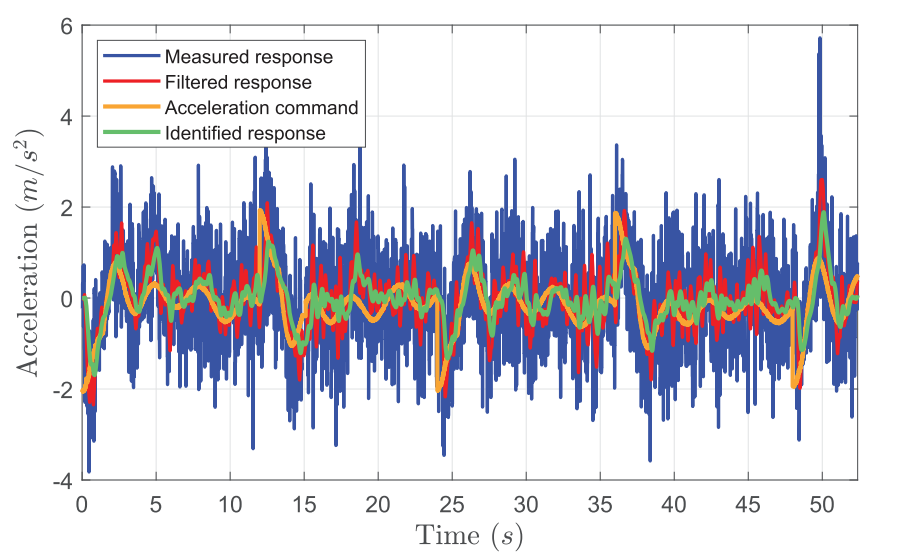
- 不同于对完整内环控制系统进行建模的方法,该研究通过数据驱动辨识建立了一个简化的一阶内环模型。在此基础上,提出了一种基于不确定性与干扰估计器(UDE)的反步控制方法,以解决多环控制系统中普遍存在的失配扰动问题。
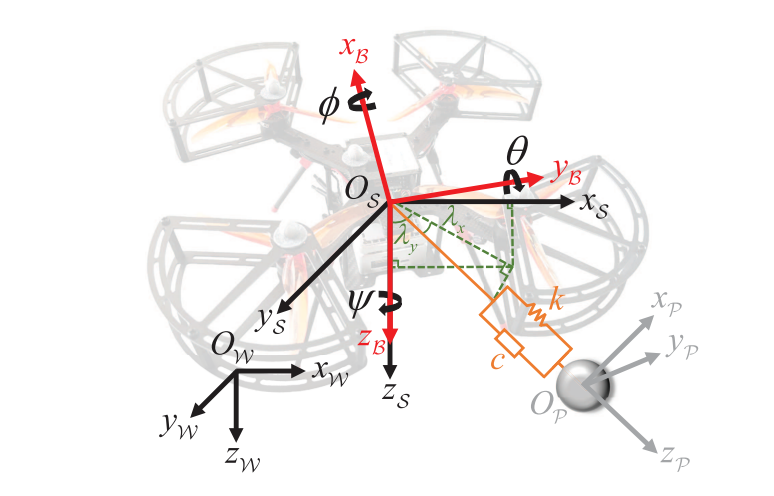
弹性自由度
- 绳索弹性为系统引入了额外的自由度,使得虚拟消摆加速度指令的设计变得困难。为此,本文利用奇异摄动理论证明:当弹性系数足够大时,在不可伸长绳索假设下设计的控制律对于弹性绳索系统仍然是可行的。
03 实验测试
仿真场景1
带初始摆角的悬停飞行
在此仿真场景中,四旋翼需要在具有初始摆角的情况下执行悬停飞行。实验显示:
位置跟踪误差和货物摆角的衰减性能,该研究所提出的控制器表现最优。特别是在四旋翼进行机动动作以减小货物摆动时,所提出的控制方法能够在初始阶段有效抑制货物摆动,尽管此时位置误差较大。
与其他两种对比控制方法相比,该控制方法在轨迹跟踪和消摆性能上均表现优异。
本控制方法仅在x轴和y轴设计了消摆控制器,确保了高度稳定性。相比之下,有限时间收敛控制方法在所有轴向都引入了消摆控制,这导致四旋翼在衰减摆动时需要调整高度,从而破坏了高度保持性能。
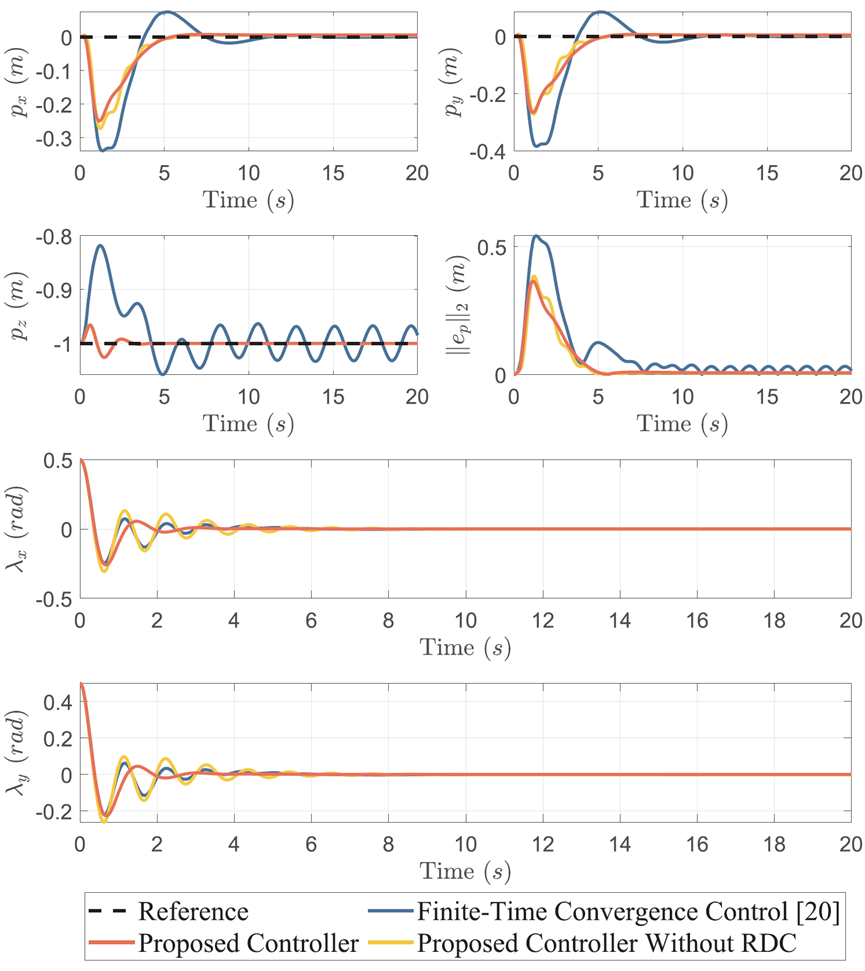
仿真场景1(带初始摆角的悬停飞行):四旋翼跟踪误差和货物摆角
仿真场景2
航点飞行
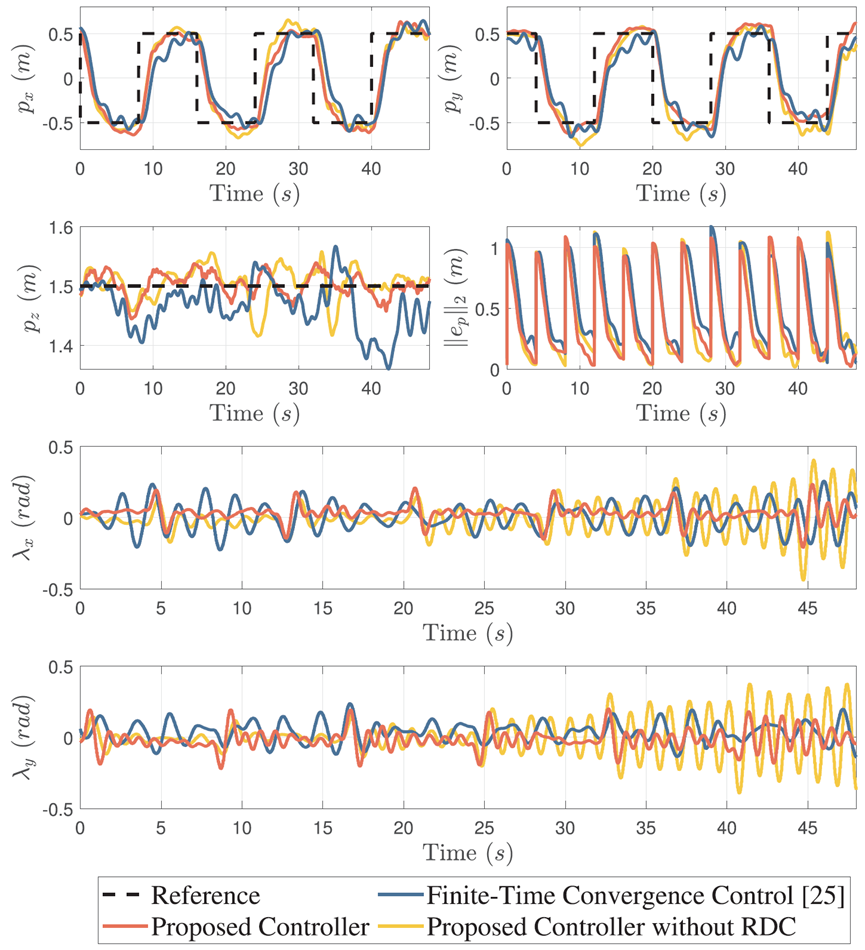
该场景中,四旋翼在两个航点之间切换,切换周期为30秒。仿真结果表明:
由于参考位置的切换引发四旋翼的激进机动,货物摆角不可避免地增大。所提出的控制方法展现了优越的瞬态响应,能够在摆角增大的同时,迅速收敛至稳态。
与其他两种控制方法相比,该方法能够以最小的摆动幅度快速收敛到稳态,确保了最优的轨迹跟踪和消摆性能。
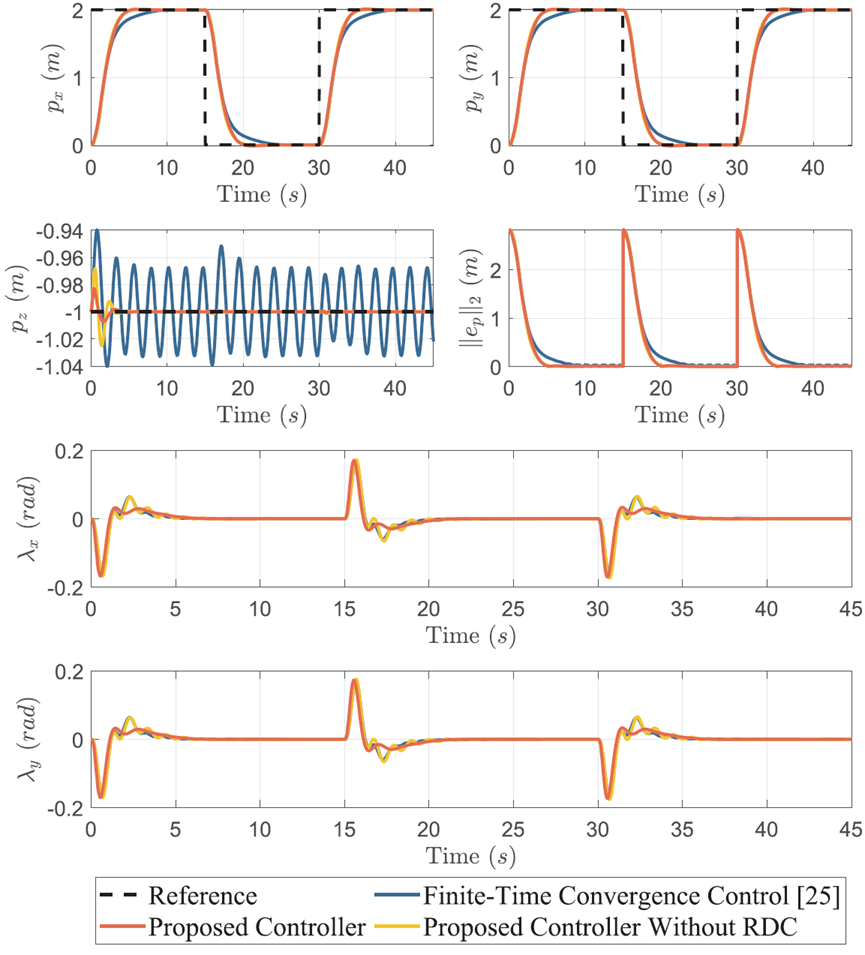
仿真场景2(航点飞行):四旋翼跟踪误差和货物摆角
仿真场景3
轨迹飞行
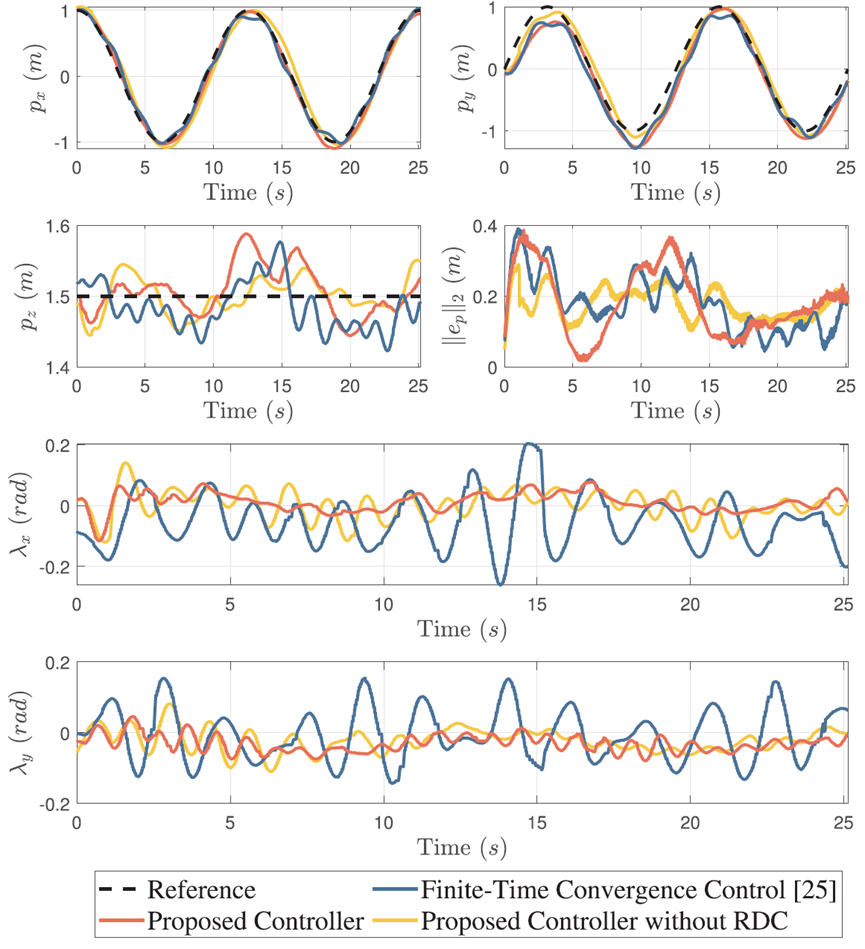
四旋翼在水平平面内跟踪一条连续的圆形轨迹,同时保持高度参考不变。实验结果显示:
所提出的控制方法能最小化轨迹跟踪误差,未引入RDC的控制方法在跟踪性能上有所下降。
摆角方面,所提出的控制方法能够实现最小的摆角幅值,并且摆动衰减速度最快。
需要注意的是,在该工况下,由于四旋翼需要持续变化其加速度来跟踪圆形轨迹,因此货物摆角无法严格收敛至零,这一现象符合物理规律。
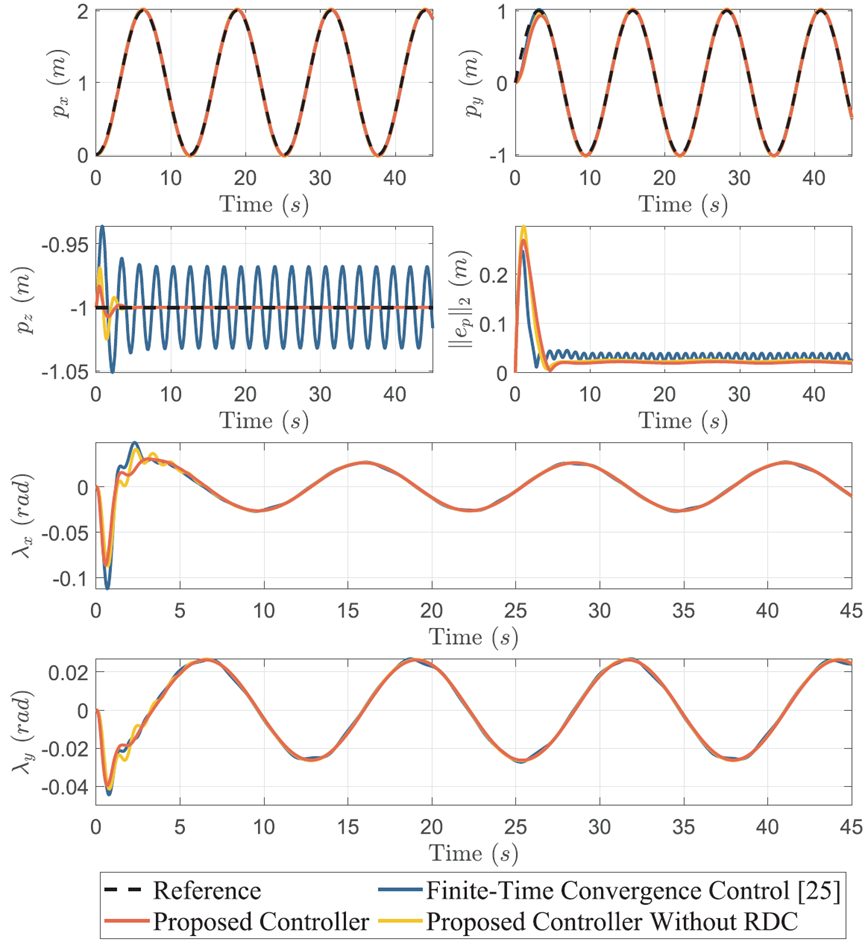
仿真场景3(轨迹飞行):四旋翼跟踪误差和货物摆角
实飞测试1
悬停飞行与瞬时扰动
实验中对货物施加瞬时扰动,验证了消摆能力:
- 该研究所提出的控制方法能够在2秒内有效衰减摆动,而有限时间收敛控制在此过程中表现较差,无法有效保持稳定。
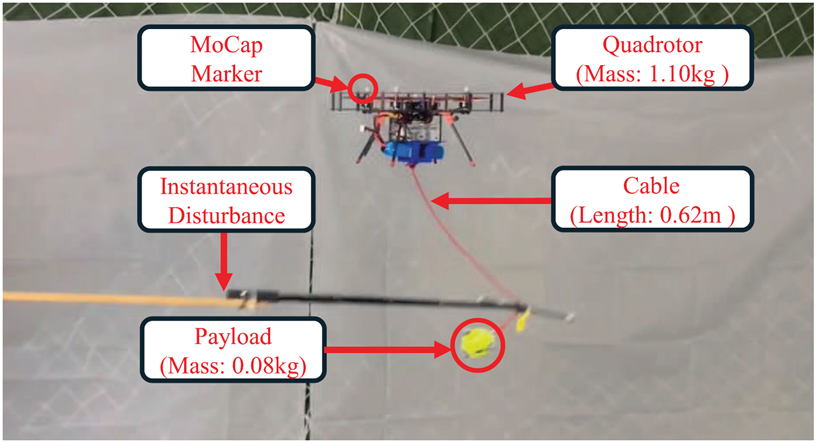
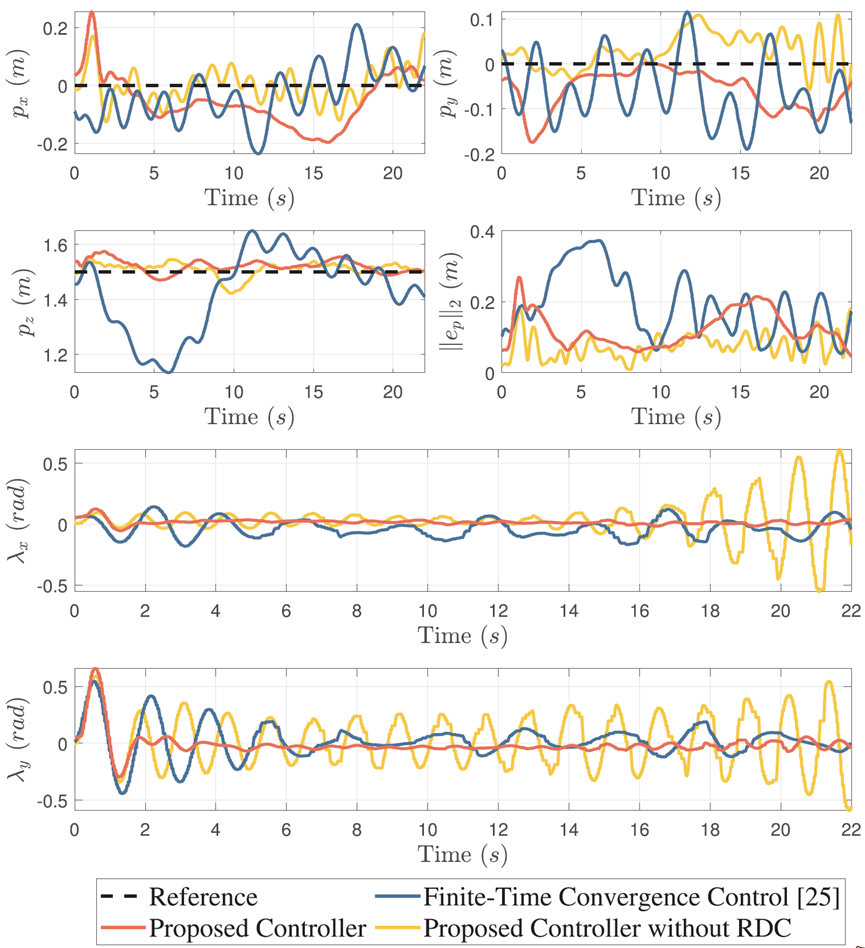
受瞬时扰动下的悬停飞行:四旋翼跟踪误差和货物摆角
实飞测试2
航点飞行
四旋翼需要在4秒的切换周期内依次跟踪四个航点。
实验显示:
四旋翼在切换航点时,激进的机动动作导致货物摆角迅速增大。所提出的控制器能够快速衰减摆角,并保持最优的轨迹跟踪性能。
与有限时间收敛控制和未引入RDC的控制方法相比,所提出的控制方法在衰减摆动方面表现出明显的优势。
航点实飞下的四旋翼跟踪误差和货物摆角
实飞测试3
轨迹飞行
为了验证四旋翼在跟踪连续轨迹时的性能,四旋翼需要跟踪一条圆形轨迹。实验表明:
- 该研究所提出的控制方法和未引入RDC的控制方法在此场景下表现相当,但由于四旋翼的加速度变化较平缓,货物摆角变化不大,因此RDC的作用不显著。
轨迹实飞下的四旋翼跟踪误差和货物摆角
结论
该研究所提出的控制方法在大多数情况下,特别是在大摆角和航点切换场景中,能够实现更精准的轨迹跟踪和更快的摆角衰减。
引入RDC模块后,系统的低层控制响应得到了有效提升,尤其在面对大摆角扰动时,所提出的控制方法显著优于传统的双环控制方法。
在圆形轨迹跟踪的平稳场景中,三种控制方法的性能相差不大,RDC的作用并不显著。
资源速递
论文:
Robust Dynamic Compensator-Based Hierarchical Control for Quadrotor-Suspended-Payload System With Actuation Constraints
期刊:
IEEE Transactions on Intelligent Transportation Systems
DOI:10.1109/TITS.2025.3594288
论文链接:
https://ieeexplore.ieee.org/document/11122372
点击左下角阅读原文即可跳转论文链接

如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:
bbs.amovlab.com**(点击左下角阅读原文跳转)**
有工程师亲自解答
10000+无人机开发者和你共同进步!


