Science子刊|多无人机协同吊载高速钻过0.8米窄缝
0.8米有多窄,三架无人机用缆绳协同吊起重物时,系统在悬停构型下的整体宽度约1.4m,如果不改变构型与负载姿态,根本无法通过0.8m的通道。更关键的是能否在狭窄间隙里兼顾高速机动与稳定控制?
代尔夫特理工大学Sihao Sun团队于2025年10月29日在Science Robotics发表论文“Agile and cooperative aerial manipulation of a cable-suspended load”。提出一种中心化的协同规划与控制框架:将避障与防碰撞约束纳入协同决策,实现对负载全位姿的高机动控制,从而让多机吊载系统能够完成对0.8m狭窄通道的高速穿越。
视频来源:https://www.youtube.com/watch?v=FBWN-rTK1YU
文末还附有论文与项目主页链接,方便您一键直达。
技术难点
要让多无人机协同吊载既能高速机动、又能安全避障,还不依赖负载传感器,难点主要集中在:
全位姿高机动控制难:负载位置与姿态是通过缆绳张力间接实现的,高速机动时缆绳方向/张力快速变化,耦合效应强,容易带来跟踪误差与振荡。
避障与防碰撞要同时满足:在狭窄环境中不仅要避开障碍物,还要保证机间安全距离等约束,可行空间被压缩,往往需要改变队形和负载姿态才能通过。
负载不装传感器的闭环更难:不在重物上安装传感器意味着负载状态需要依赖无人机端信息进行估计,估计误差在高机动下更容易放大为控制误差。
10Hz在线规划的“平滑切换”:轨迹滚动更新时,新旧预测轨迹必须平滑衔接(高阶连续性),并且要能稳定初始化新的预测轨迹,否则会出现突兀动作影响稳定性。
研究亮点
该研究最关键的是用全身动力学的在线运动规划,替代传统“外环算力分配、内环各自跟随”的级联控制。规划器直接给出系统未来一段可执行的协同轨迹,机载鲁棒跟踪则用于抵消载荷模型不准和外界扰动带来的偏差。这样多机协同不再纠结“力怎么分”,而是围绕同一条预测轨迹协同飞行,让多机吊载具备高速、稳定的机动能力。
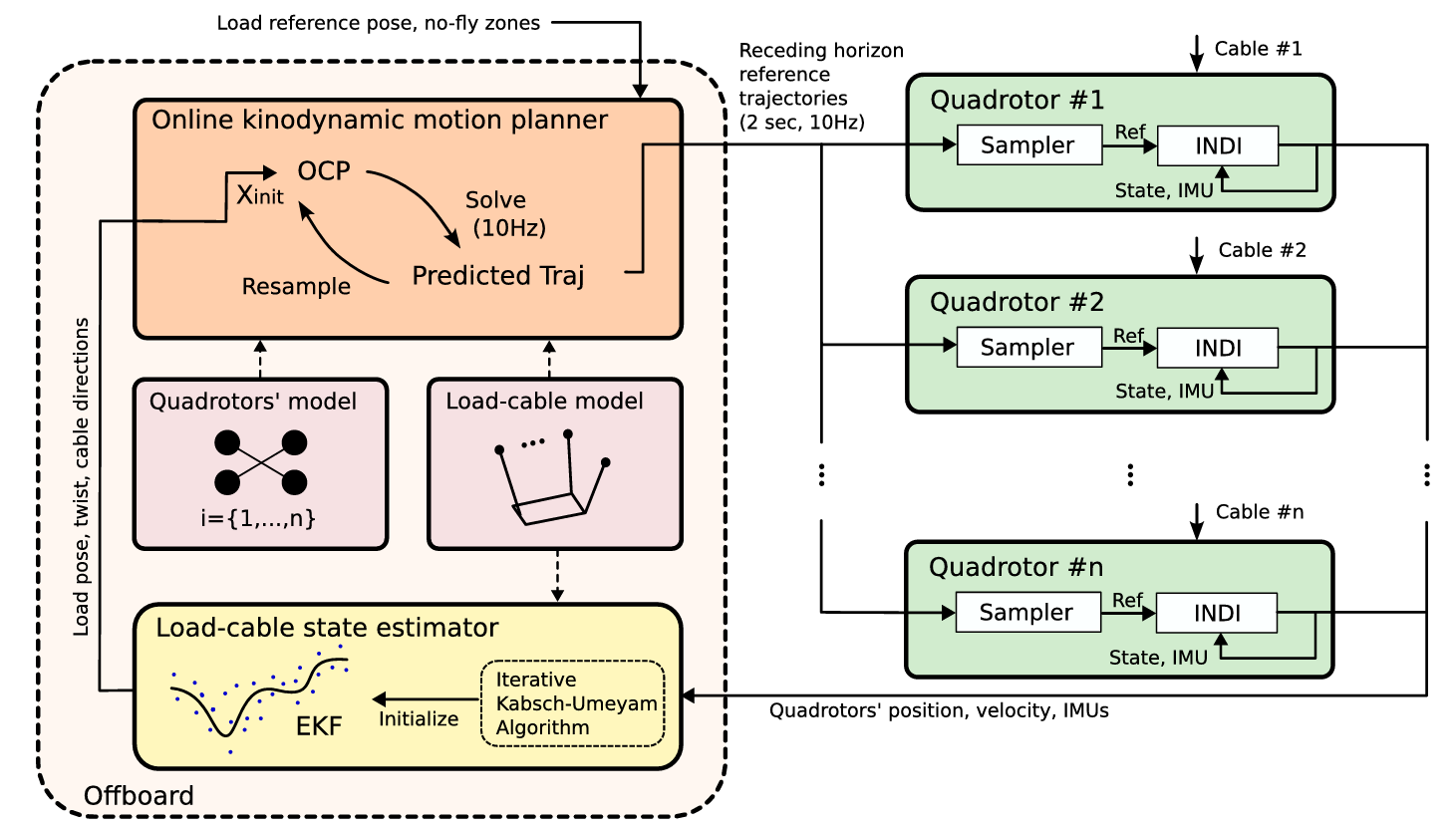
图1|方法总览:从规划到执行的闭环框架
中心化协同轨迹规划
该研究采用中心化在线规划,统一生成多机协同轨迹。规划器以滚动方式求解有限时域最优控制问题(OCP),以10Hz的频率滚动更新,预测未来约2s的可行轨迹,并同时把无人机–负载耦合、推力上限、缆绳保持绷紧、机间防碰撞与障碍物避让等约束一并纳入,确保轨迹既“能飞”也“安全”。
同时,为避免10Hz更新带来的轨迹“跳变”,通过对上一轮预测轨迹进行重采样(resampling),用以初始化与缆绳方向、张力相关的高阶量,从而让新旧轨迹更平滑地接续。
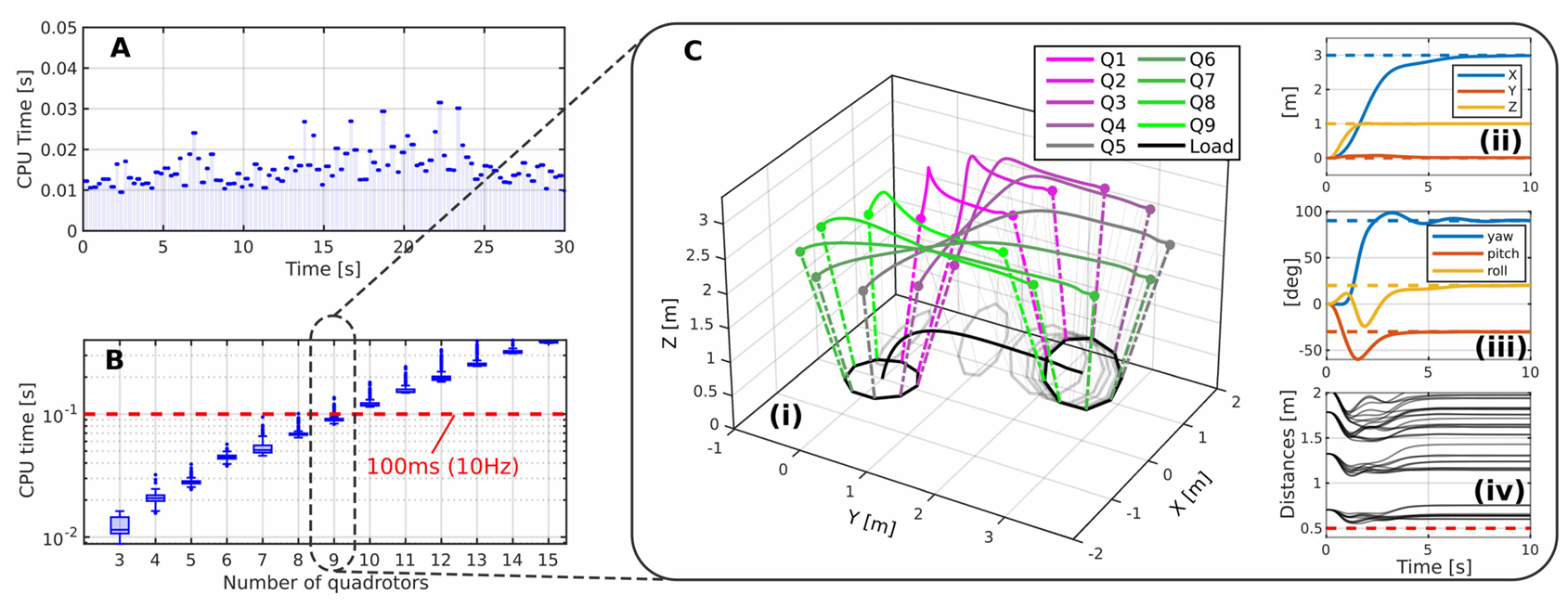
图2|在线规划的计算开销与规模扩展能力。(A) 展示真实实验中每次规划求解的耗时;(B) 无人机数量增加时,规划耗时的统计分布,并标出10Hz对应的时间预算线;(C) 多机规模更大时的示例结果,说明在更复杂/更大规模条件下,规划仍能生成满足安全约束的协同轨迹。
INDI鲁棒跟踪
机载轨迹跟踪控制器采用 INDI(incremental nonlinear dynamic inversion,增量非线性动态反演)进行轨迹跟踪,并利用IMU反馈对缆绳力带来的扰动进行在线补偿。规划中缆绳张力的误差(例如来自负载惯量模型不匹配)会被机载控制器有效补偿,从而带来对模型不确定性的鲁棒性。
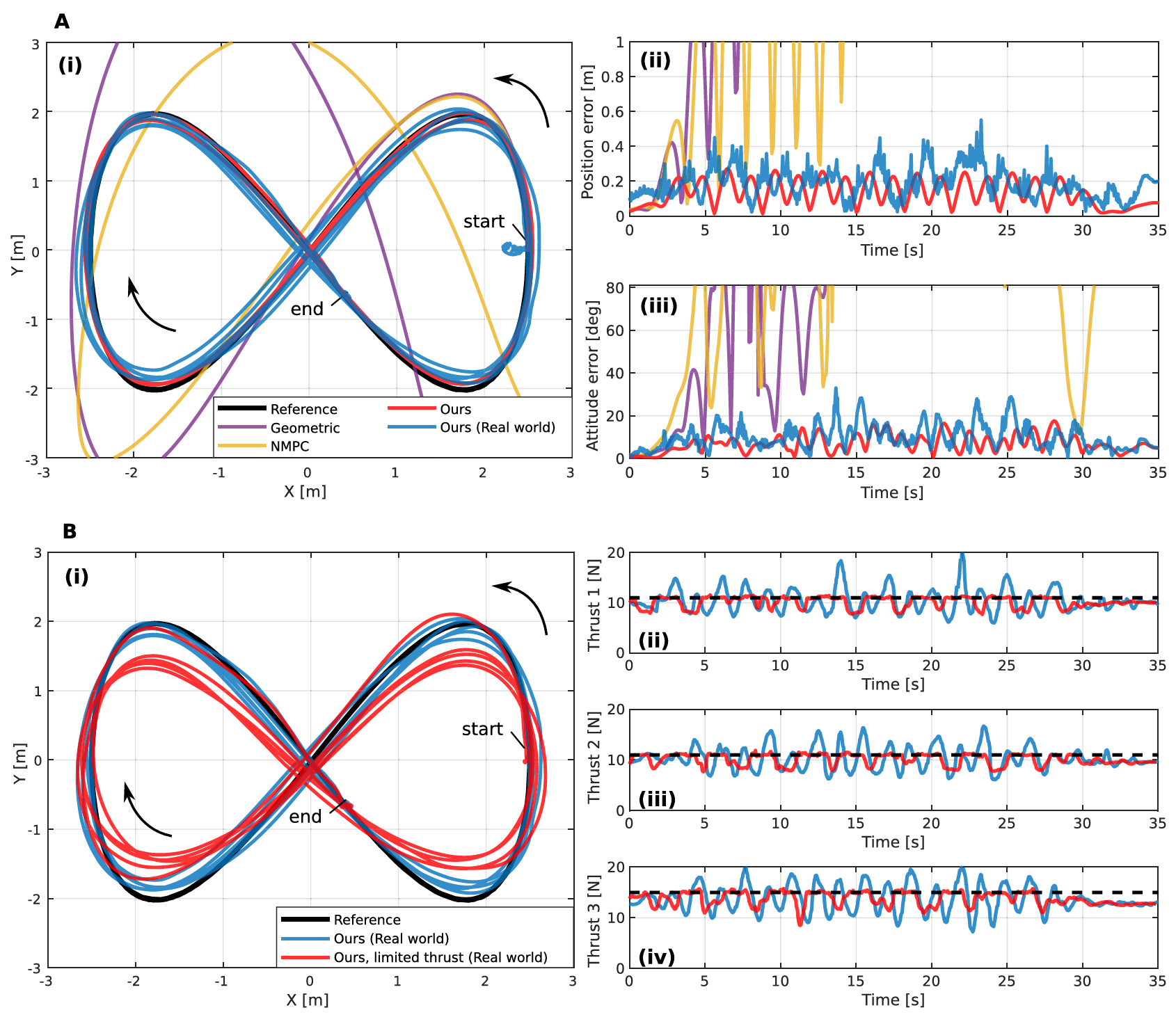
图3|Fast 参考轨迹下的跟踪性能与推力受限测试.(A) 在高机动 “Fast” 参考轨迹(如 8 字)下,对比本文方法与基线方法的实际轨迹,以及位置/姿态误差随时间的变化,展示本文在高速情况下仍能稳定跟踪。(B) 当把推力上限进一步收紧、参考动作变“更难做”时,图中给出轨迹与三架无人机的推力曲线(含上限线),说明系统能在约束内自动生成并跟踪可行动作,而不是硬追不可行参考导致失稳。
负载端无传感器
框架里有一个中心化EKF,利用负载-缆绳模型,融合无人机的状态估计与IMU测量,输出规划器所需的负载状态与缆绳方向。从而降低了对负载改装与布设的依赖。
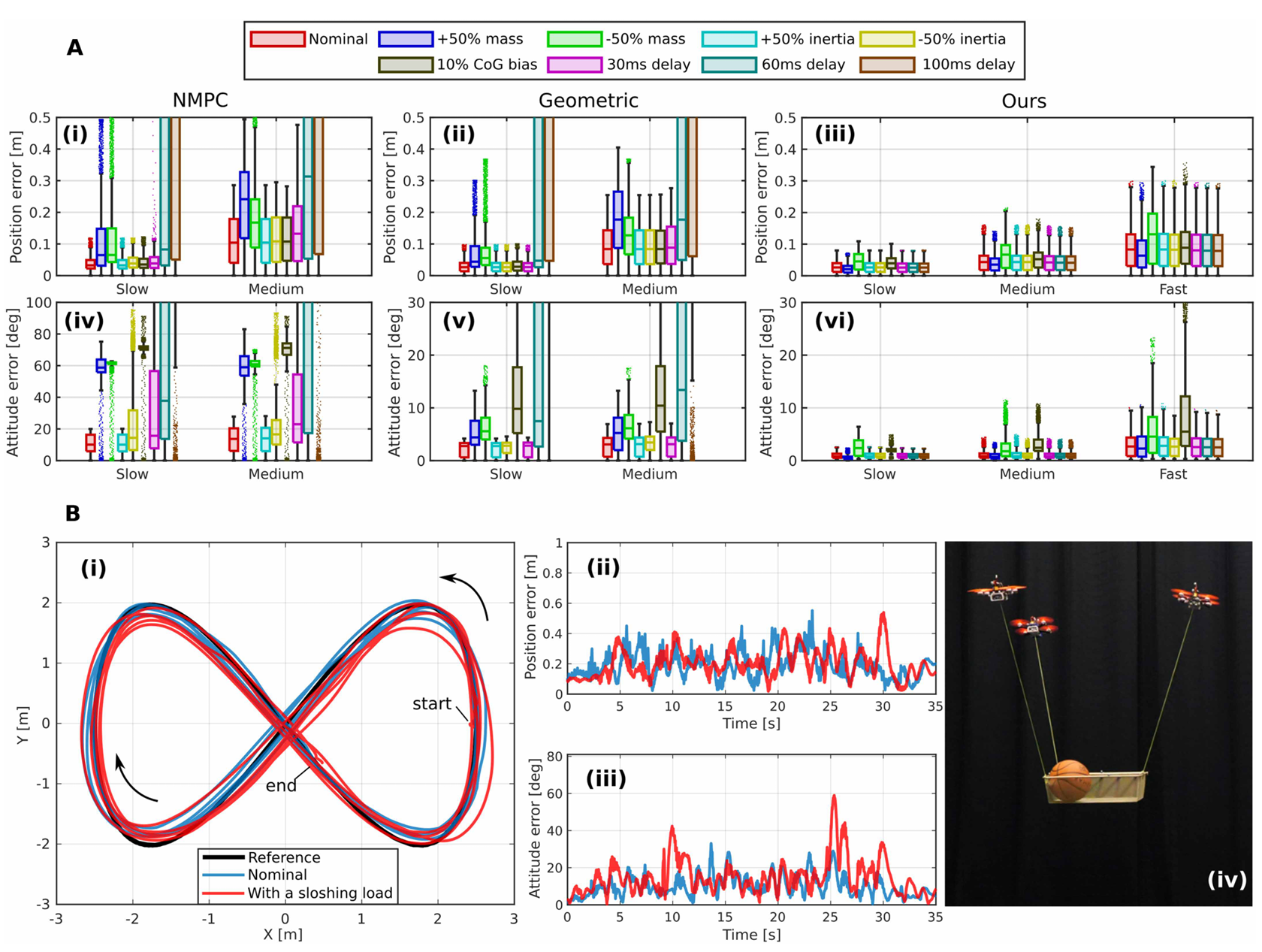
图4|载荷模型不确定性与通信延迟下的鲁棒性验证。(A) 在质量/惯量/质心偏差、通信延迟等不确定条件下,统计不同方法在 Slow/Medium/Fast 参考下的位置与姿态误差(箱线图对比);(B) 真实实验加入“晃动/未知附加载荷”(如篮球)引入显著模型失配:给出轨迹对比、位置/姿态误差时间历程与实验快照,说明即使负载特性变化且算法未知,系统仍可维持可控跟踪。
实验测试
高速轨迹跟踪
研究团队搭建了三机协同吊运平台:由3架基于Agilicious改装的四旋翼,协同吊装1.4 kg的负载。测试高速条件下该系统能否稳定跟踪、带约束时能否安全完成动作、在外扰与建模偏差下是否仍然可靠。
在“8 字形”飞行测试中,系统以最高5m/s的速度、8m/s²的加速度完成轨迹跟踪。对比结果显示,传统几何控制与NMPC在同等激烈动作下更容易出现不稳定,而该系统仍能保持闭环可控,载荷位置误差基本维持在0.2m左右。
当进一步收紧推力上限时,系统会自动降低曲率,放缓动作,使轨迹保持动力学可行,避免“硬追参考”导致超载失稳。
障碍测试
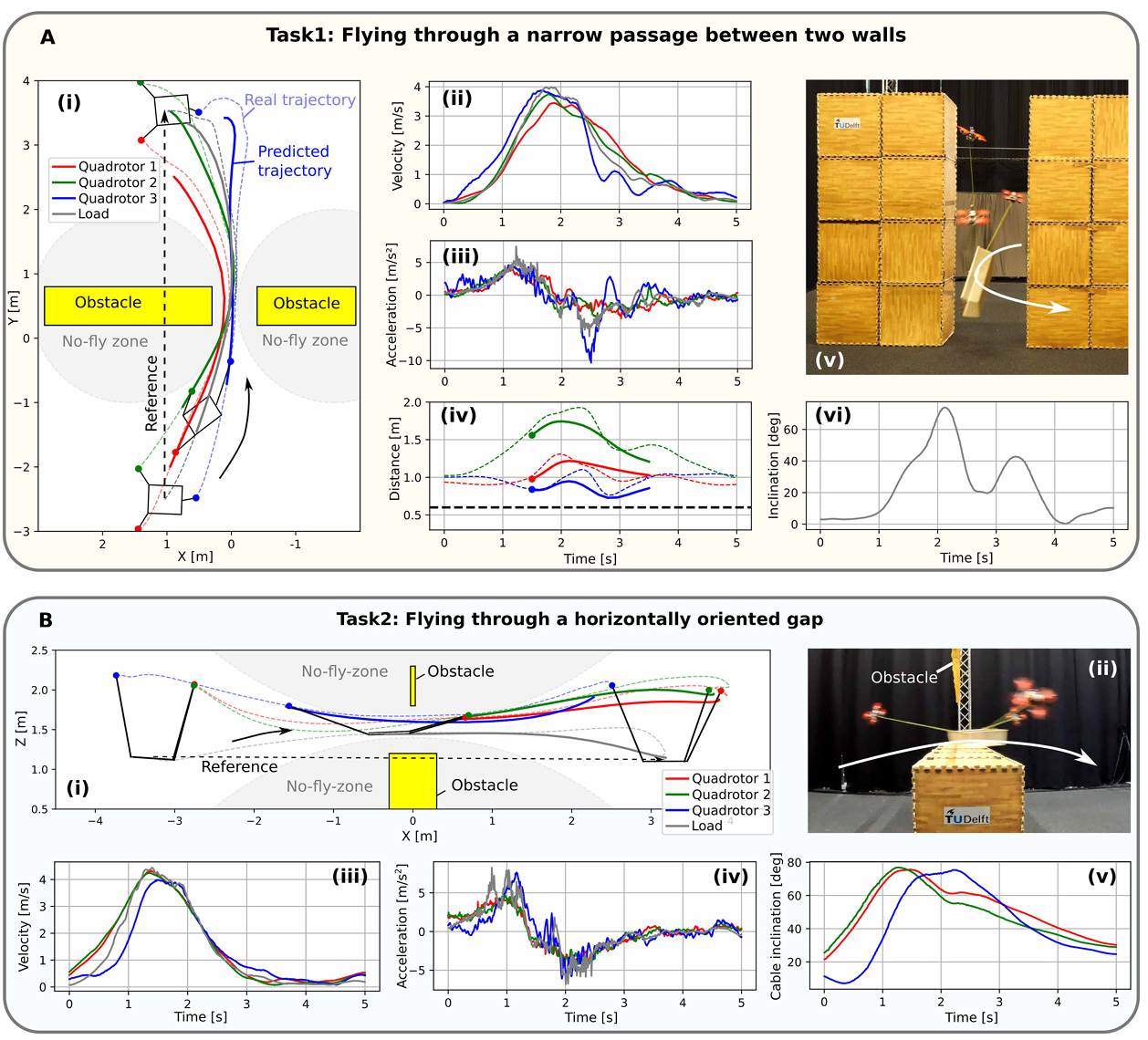
- 测试1:穿越垂直狭缝(两墙间距0.8m)
系统会自动调整载荷姿态,让负载出现约 70° 的大倾角“侧身挤过”,同时维持机间安全距离,且穿越速度超过4m/s。
- 测试2:穿越水平裂缝(高度0.6m)
在无法“慢慢钻过去”的情况下,无人机群展开队形并快速拉平缆绳,借助动量完成穿越,整个关键穿越动作约1.2s完成。
风场与载荷不确定性测试
- 风扰实验:在约5m/s风场下,系统仍能稳定完成飞行与轨迹跟踪,误差会增加但可控。
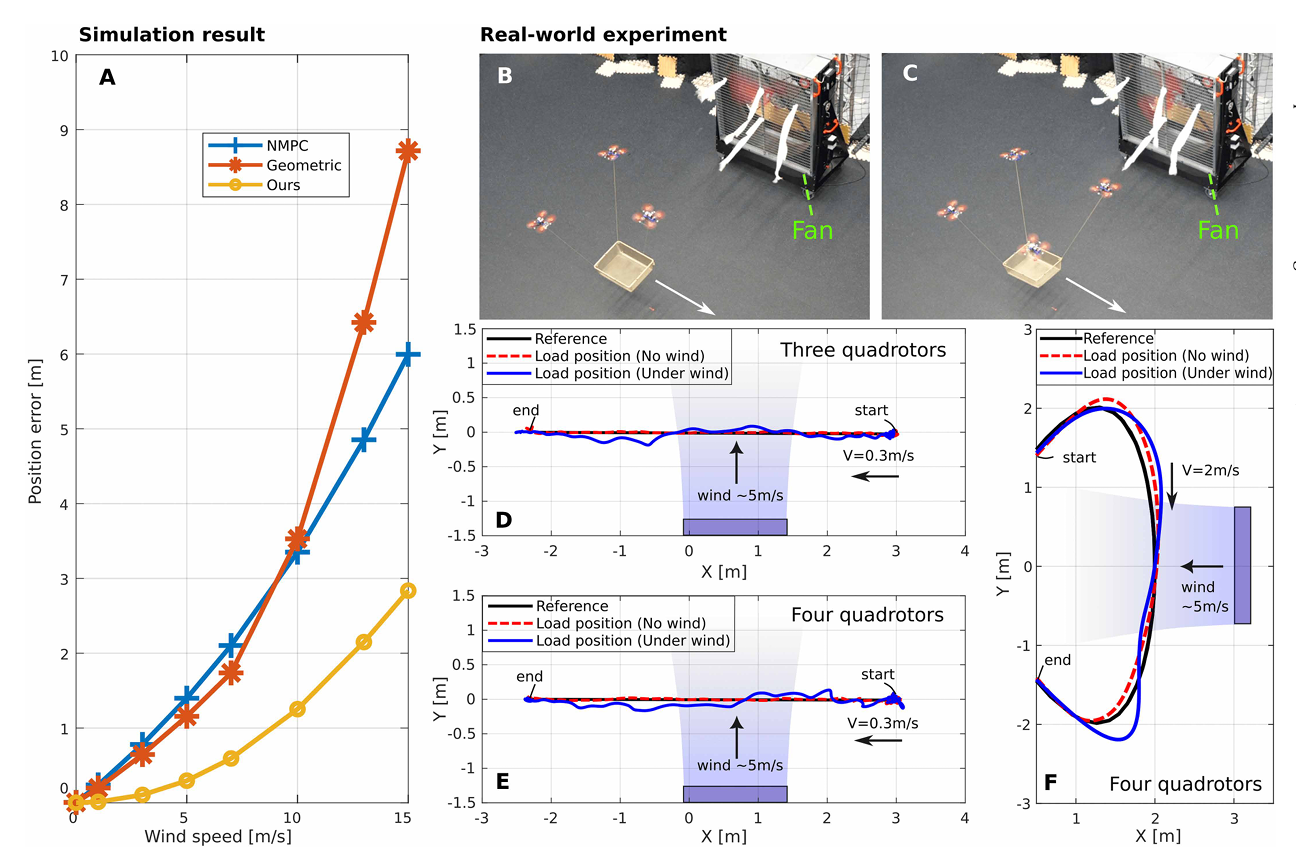
- 载荷不确定性测试:在负载里加入“会晃动的篮球”等附加物,导致重心与惯量明显变化(规划模型并不知道这些变化),系统仍能完成轨迹跟踪,说明对载荷模型误差具有较强容忍度。
展望未来
这项研究不仅适用于无人机吊运,还可推广到其他存在扰动抑制需求的系统,并且能够在狭窄空间和复杂障碍环境中真正派上用场。
比如在灾后废墟、楼道或狭窄通道里,它可以把清障工具和救援物资快速送到位。在厂房、仓库等室内场景,则能承担大件转运任务,还能安全穿过门洞、走廊这类“卡脖子”位置。在施工与运维作业中,它也适合做受限空间搬运,并把物体更快、更稳、更准地放到指定位置。
资源速递
论文:
Agile and cooperative aerial manipulation of a cable-suspended load
期刊:
Science Robotics(2025-10-29)**
DOI: 10.1126/scirobotics.adu8015
项目主页:
https://sihaosun.github.io/ScienceRoboticsCAMLs/
论文链接:
https://www.science.org/stoken/author-tokens/ST-3015/full

如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:
有工程师亲自解答
10000+无人机开发者和你共同进步!


