110km/h追车着陆,加拿大舍布鲁克大学突破无人机高速着陆瓶颈
时速110km/h、气流不稳定与乱流影响显著,多旋翼还能在飞驰车顶稳稳着陆吗?在强风、紊流与平台抖动叠加、且相对速度较大的情况下,传统“低速、水平、轻触”的着陆方式往往失效。加拿大舍布鲁克大学Createk团队在2025年发表于《Journal of Field Robotics》的研究提出“摩擦式减振(FSA)+ 反向推力(RVT)”协同方案:在触地瞬间用摩擦结构耗散冲击能量,并通过电机反转提供向下压紧力,从而显著放宽姿态与速度容差,使多旋翼在高速移动平台上实现稳定着陆。
视频来源:https://www.youtube.com//watch?v=tTUVr1Ogag0
为什么传统多旋翼“怕落地”?
常规多旋翼在“高速+扰动”场景下着陆困难,根因在于:
姿态矛盾:为对冲阻力需要大俯仰角,但传统落架要求近水平轻触,否则易弹跳或翻覆。
弹跳与滑移干扰:刚性/弹性落架把冲击能量“存”进结构弹性,随即回弹并二次接触,在乱流与相对风下易演变为滑移甚至倾翻。
着陆时序苛刻:阵风、估计误差与平台运动使“必须踩准某一瞬间水平落地”的门槛极高。
研究思路
在强阻力、高乱流、平台随机加减速等不利条件下,把“允许安全触地”的状态集合(触地点包络)显著做大,从而放宽对感知精度、控制带宽与时序的要求,让多旋翼以更快的下落速度也能稳妥着陆。为此,研究团队提出该方案由三部分协同构成:快速下落 、晚时机快速拉平、机械耗能(FSA)+ 反向推力(RVT)压紧。
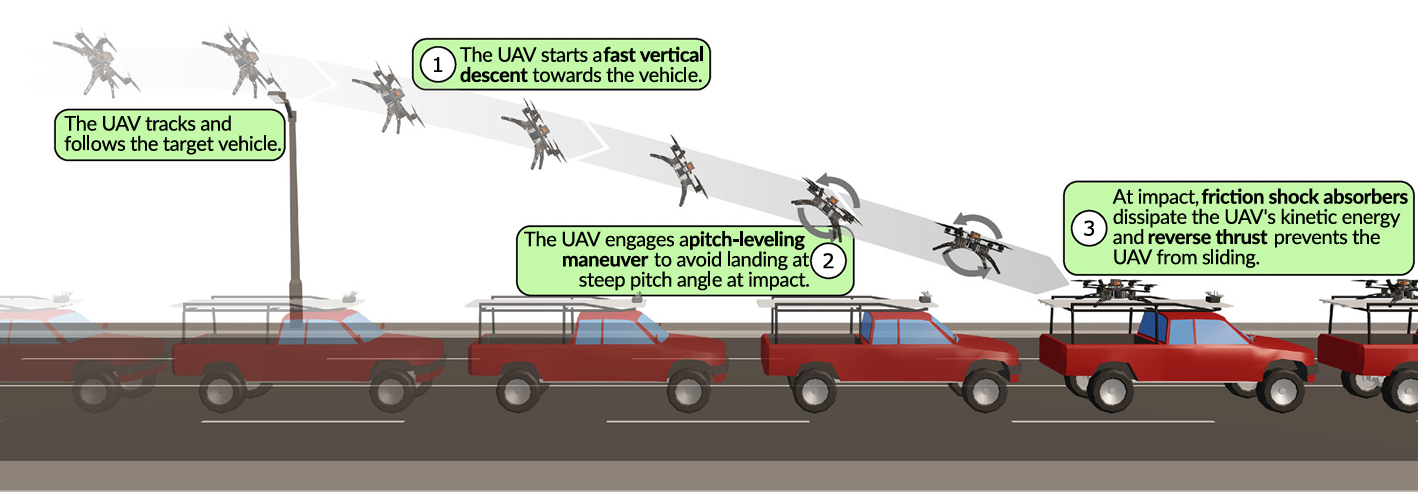
快速下落
研究团队把基线下落速度提升到约3–4m/s,用“快进近、短暴露”来规避车顶上方最“脏”的乱流带与平台随机加减速带来的干扰;
前提是触地能量能被可靠耗散且接触面不滑移,这由摩擦式减振器(FSA)负责把竖直动能直接耗散为热、避免回弹,配合触地瞬间的反向推力(RVT)向下“压住”机体增大法向力与摩擦。
这样做把对高带宽感知与精细控制的依赖转移到“可设计的物理耗能”,在真实高速场景下反而更鲁棒。
晚时机快速拉平
追车需要较大俯仰角抗阻力,若过早拉平会骤增与车的水平速度差、过晚又可能桨先触台,因此选择在触地前的极短时窗执行一次快速拉平,让触地发生在拉平过程的中段:此时姿态已改善、水平速度差尚未放大,剩余的角度/角速度误差交由FSA 吸能与RVT压紧来“兜底”。
末段切换到姿态控制执行一次快速拉平,简化对时序与感知的依赖。
放大触地点包络
用关节摩擦型FSA取代弹性储能型减震:其能量密度高,主要依靠摩擦耗能,尽量避免弹性储能引起的回弹,从根本上抑制二次扰动与滑移;
同时在触地瞬间触发RVT产生向下推力,显著增大法向力与摩擦、把机体“按住”。两者协同把“允许触地的姿态/速度误差范围”显著放大,从而放宽感知带宽与时序精度要求;
工程实现上按目标下落速度先算能量定尺FSA,再匹配电机/ESC 的快速反转能力与触发时序,最终由“包络、时序反推”的方法完成整机参数闭合。
平台与实现
整机与动力
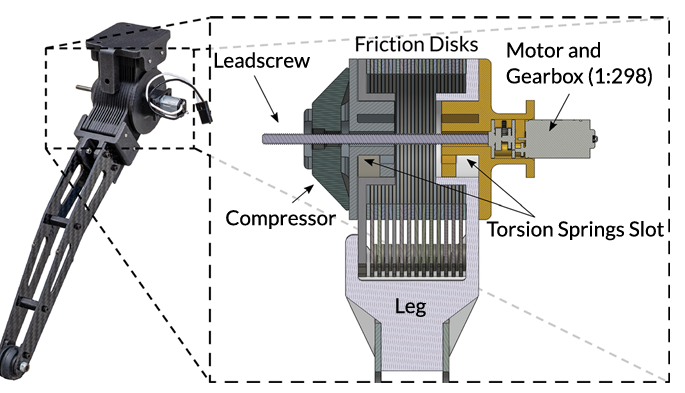
研发团队为了实现其策略,设计出了DART无人机系统。整机(含落地架)约 2.4 kg,推重比≈6.5,最高实测速度≈126 km/h。推进系统支持快速反转的电机/桨,为触地瞬间的RVT提供向下推力;机体下方配备定制的摩擦式减振器(FSA),在着陆时负责高效耗能、抑制回弹并提高落地稳定性。
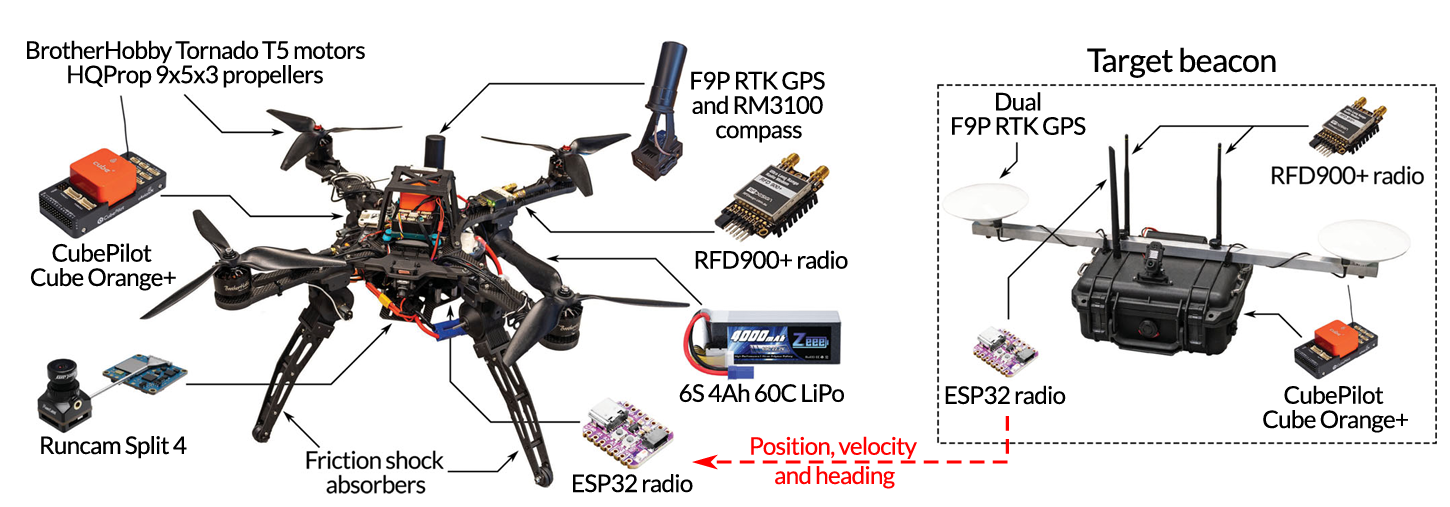
FSA落地架的核心思路是用“摩擦耗能”替代“弹性储能”:每条支腿内的摩擦盘在触地时相对旋转,将竖直冲击动能直接转成热量,不回弹、少二次扰动;足端橡胶增摩配合RVT 反向推力把机体“压住”,显著抑制滑移/倾翻。
定位与通信
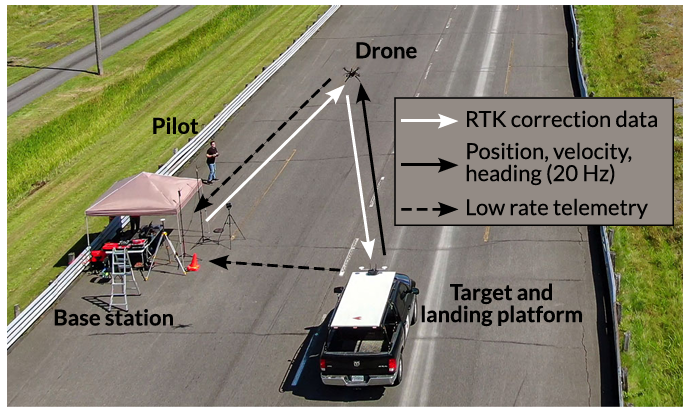
相对定位:机载 RTK + 车载双 RTK 信标(含航向),提供厘米级相对位姿。
链路:无人机与信标之间通过ESP32 P2P 实时传输(约 20 Hz);RFD900+ 做遥测;地面站转发RTK差分。
近地气动与模型修正
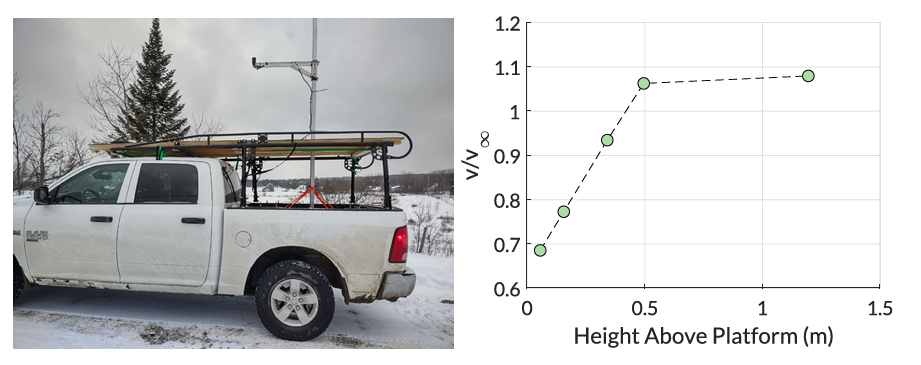
实测发现车顶平台上方存在显著边界层:贴近表面气速较自由来流最多降低约32%,边界层厚度约42cm。这解释了高车速下并未出现预期“被刮走/滑移”的现象,并被纳入仿真模型修正气动阻力。
实验验证
团队在200米与400米直线路段,以10–110 km/h 车速下进行外场测试,共完成38次追车着陆,结果显示全部着陆成功。
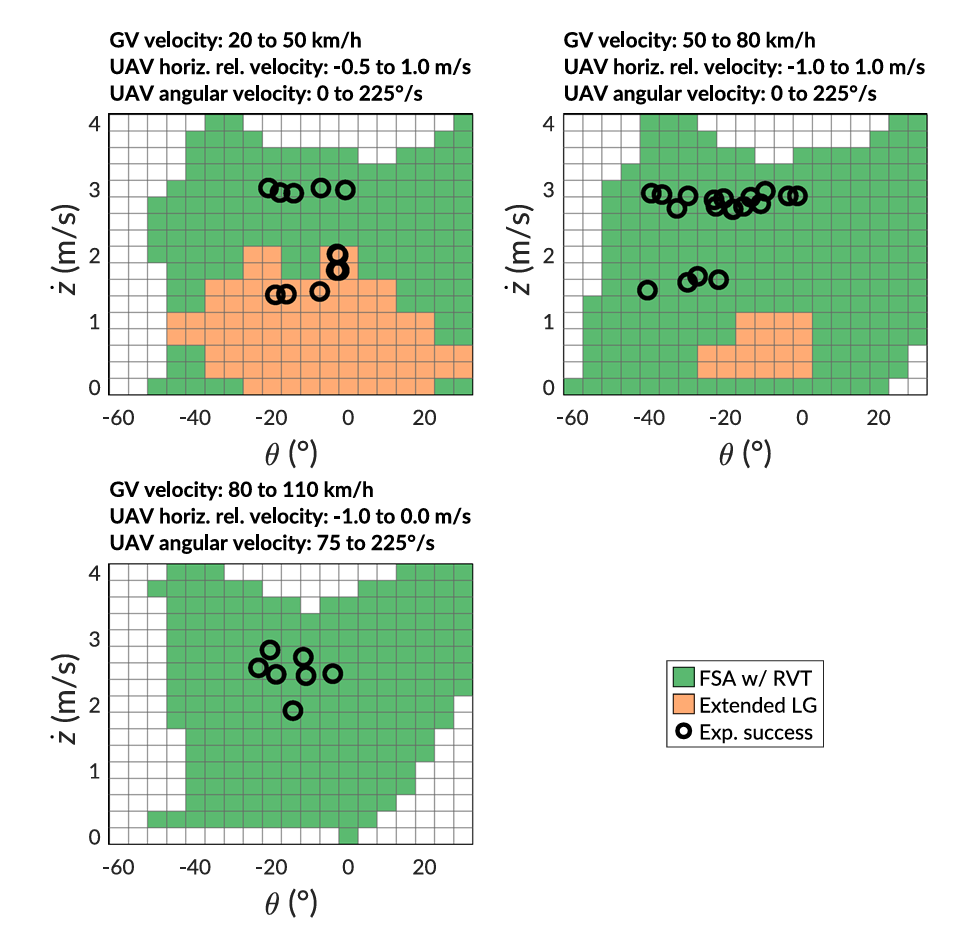
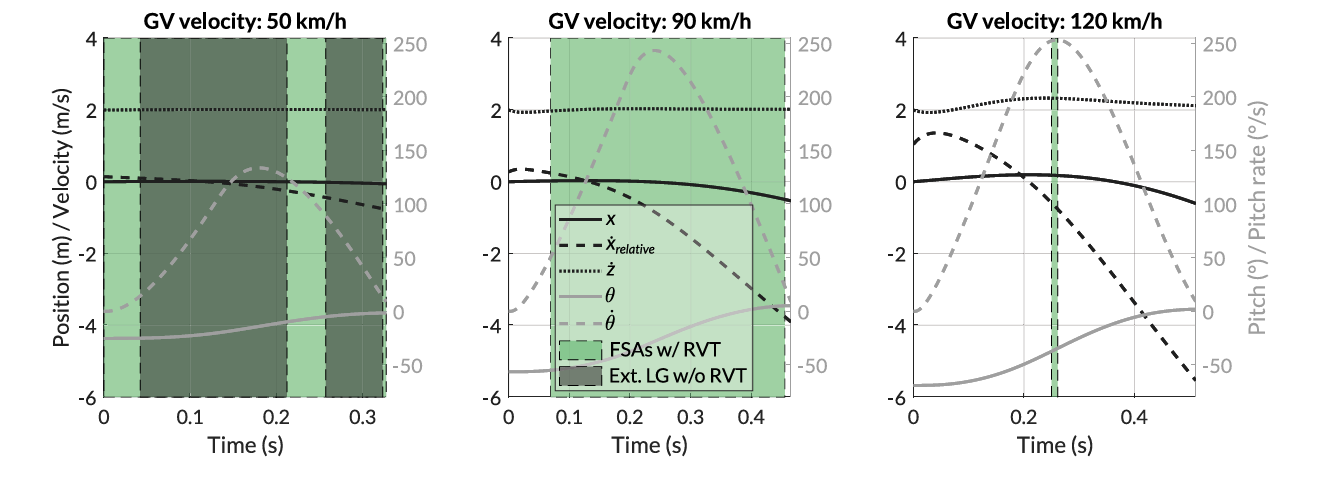
触地状态与落地表现
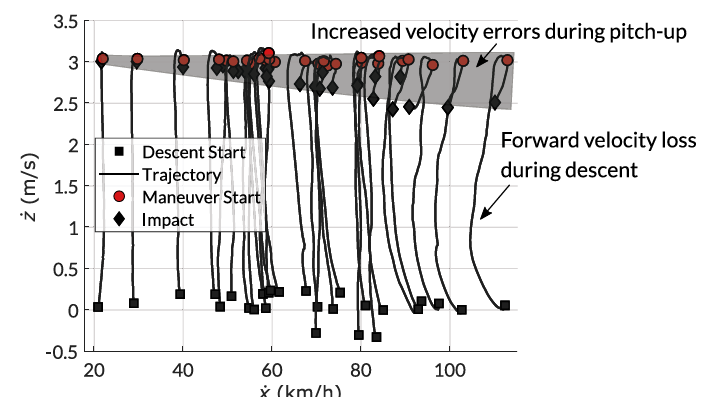
- 结果显示,触地瞬间竖直速度约1.4–3.0 m/s、相对水平速度约−0.9–1.1 m/s、俯仰角约−41° 至 0°、俯仰角速度约 0–240°/s。着陆后机体不出现回弹而是稳定贴附平台;即便在110 km/h工况下,平台上的滑移量约≤2 cm。这些现象与机制预期一致:FSA将冲击动能直接耗散、抑制回弹,RVT在触地瞬间提供向下推力、增大法向力与摩擦,从而限制滑移并提升稳定性。
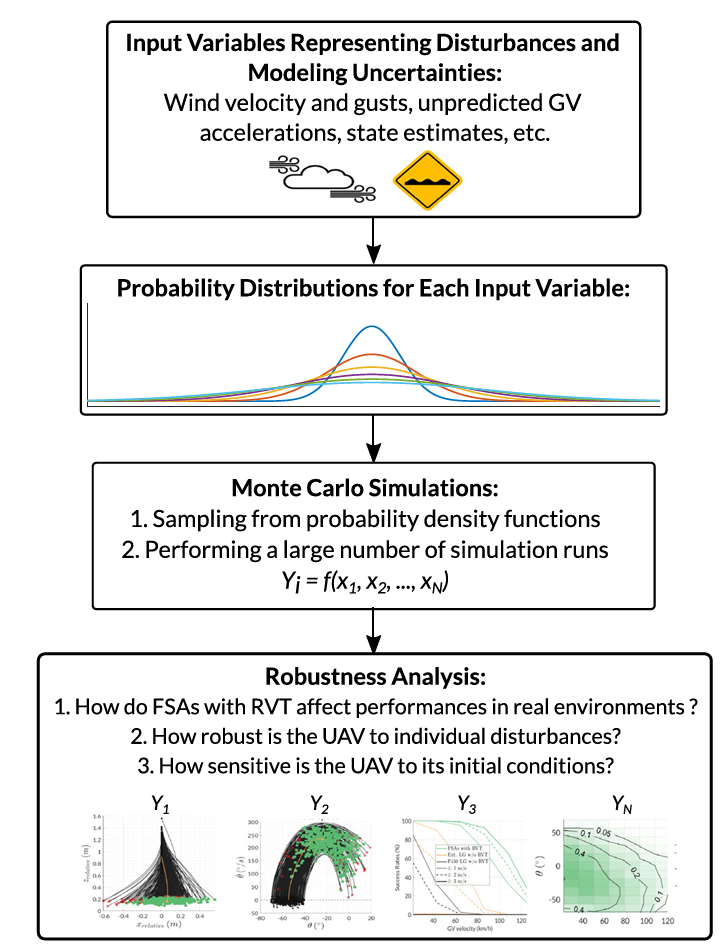
蒙特卡罗仿真
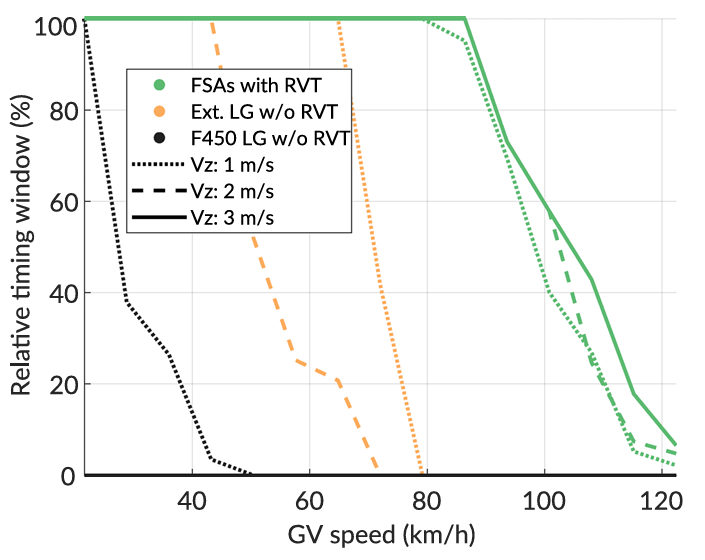
研究团队基于蒙特卡罗方法,进一步对风场、车辆加速度、状态估计误差与边界层不确定性等进行采样,覆盖 1/2/3 m/s 下降速率与 6–34 m/s(约 20–120 km/h)车速组合,总计90000组仿真。结果显示:
刚性落架:下降越快,成功率下降(易回弹、包线缩小)。
FSA+RVT:下降速度由1至3 m/s 的速度提升而成功率上升,其在最佳下降速下可在≈103 km/h下保持~80% 成功率。
资源速递
论文题目:
《Friction Shock Absorbers and Reverse Thrust for Fast Multirotor Landing on High-Speed Vehicles》
论文链接:
https://doi.org/10.1002/rob.70069

如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:
bbs.amovlab.com
有工程师亲自解答
10000+无人机开发者和你共同进步!


