SU17-Orin适配YOPO,端到端避障开箱即用
天津大学开源的端到端规划算法YOPO(You Only Plan Once) 基于最优控制理论和对抗训练方法,在保证模型鲁棒性的同时,大幅降低训练与推理的计算量,能够实现感知、规划与控制的高效融合。
为便于科研人员、开发者与无人机爱好者使用,SU17-Orin选配包已预装并适配YOPO模块,用户无需额外环境配置开箱即用。
YOPO优势
极高的计算效率
YOPO最大的优点是计算效率高,实验表明,YOPO能够将对抗训练的时间缩短到接近普通训练(Natural Training)的2到3倍,而传统的PGD对抗训练可能需要10倍以上的时间。
理论保障
YOPO并非简单的工程技巧,而是基于微分方程和最优控制理论的严格数学推导,算法收敛性和有效性得到理论支撑。
保持防御效果
尽管计算量显著减少,但YOPO训练出的模型在面对白盒攻击(攻击者知道模型全部信息)和黑盒攻击时,仍保持与PGD 对抗训练模型相当甚至更优的鲁棒性。
良好的泛化性
YOPO更像是一个训练框架,而不是一个具体的攻击算法。它可以与多种攻击方法(如PGD)结合使用。
YOPO自主导航操作指南
以下步骤展示了如何在SU17-Orin选配包中启用 YOPO 端到端视觉避障功能。
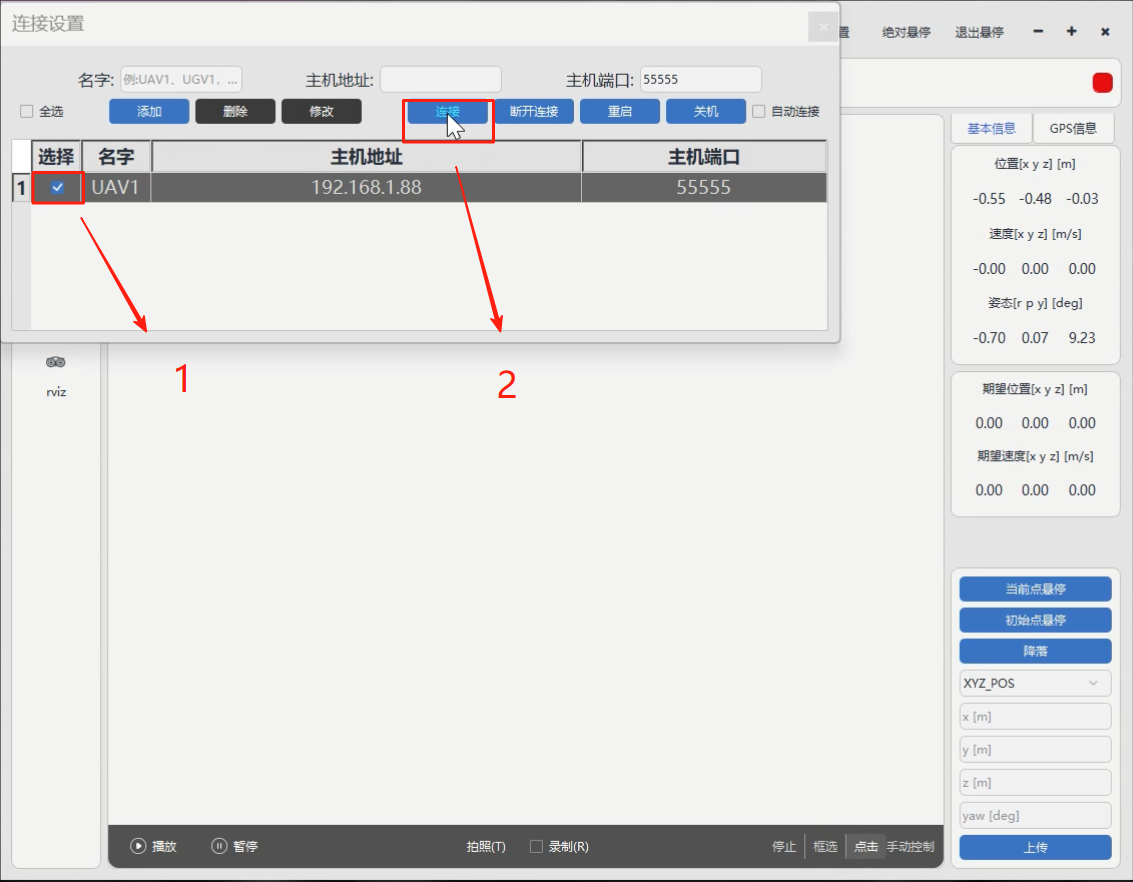
连接设置
点击地面站连接设置,连接飞机。
启动BSA_SLAM
根据图片中的顺序依次点击启动BSA_SLAM四目定位。
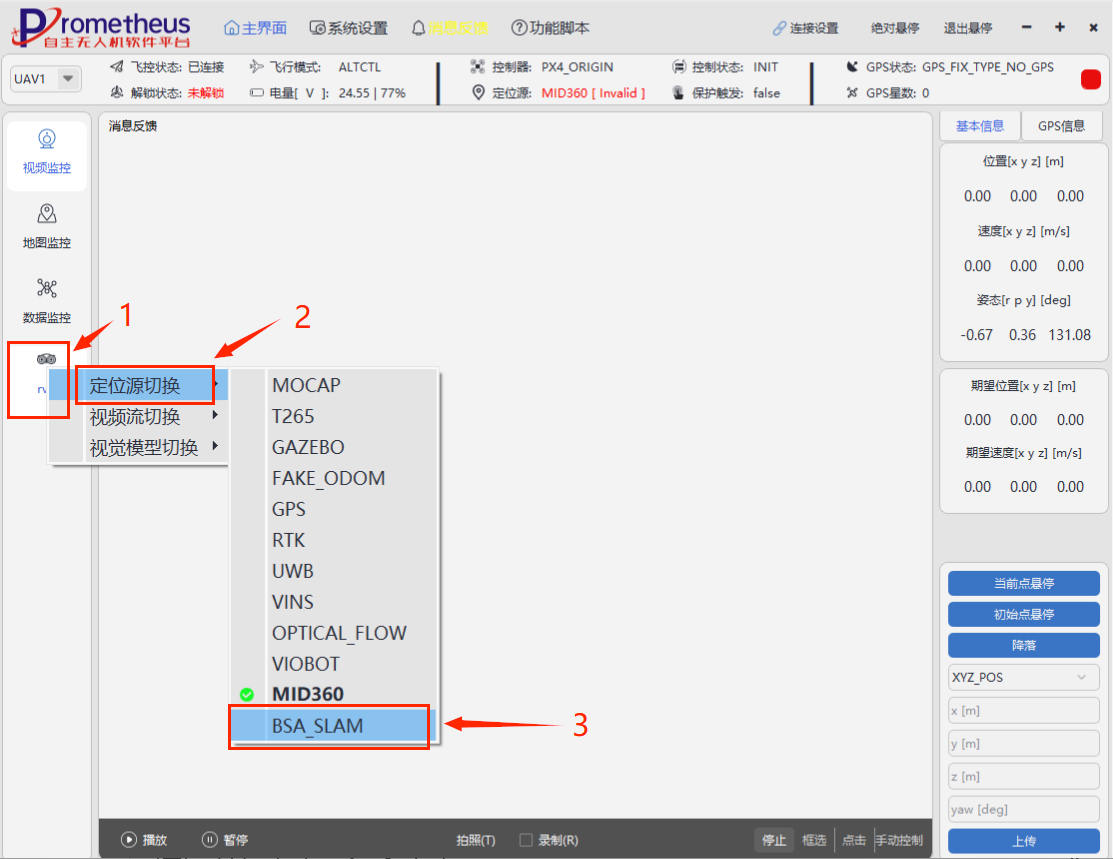
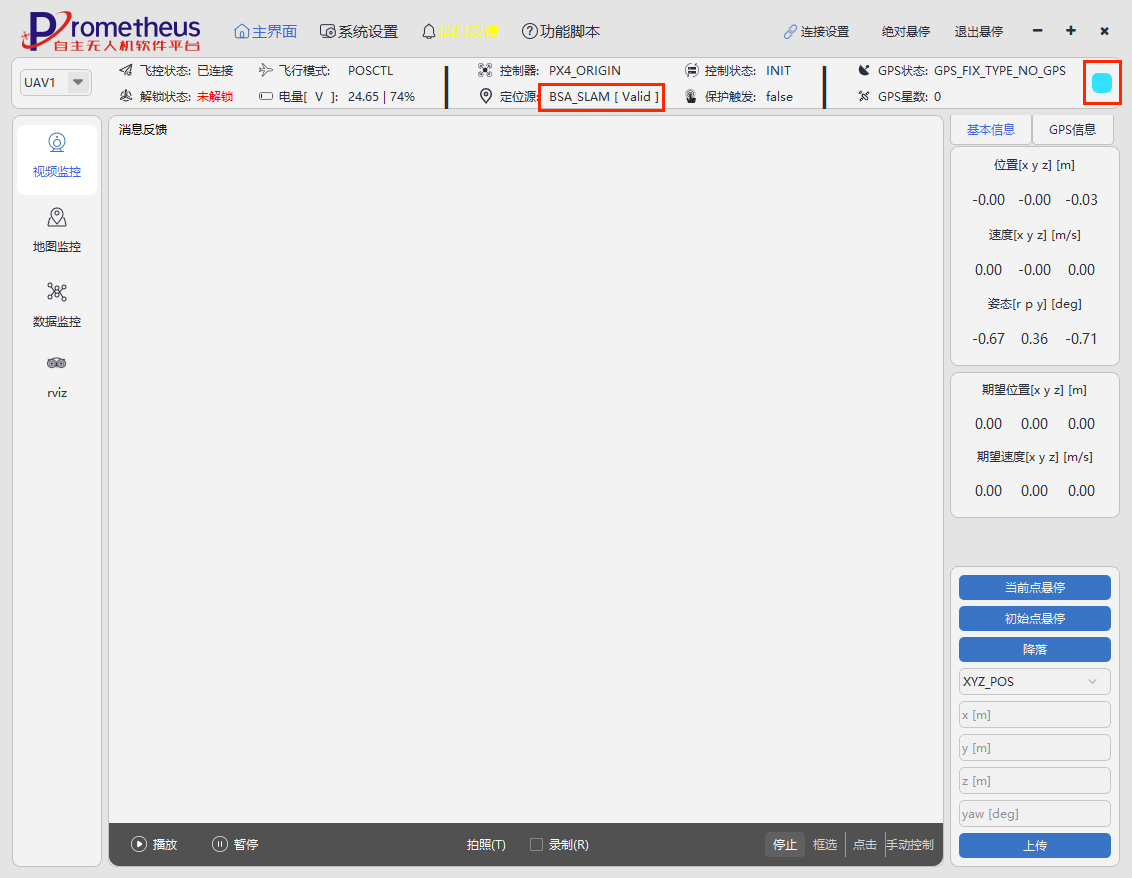
启动成功后请耐心等待,查看到定位源切换成功,地面站右上角由红色变为蓝色,说明四目定位已启动。
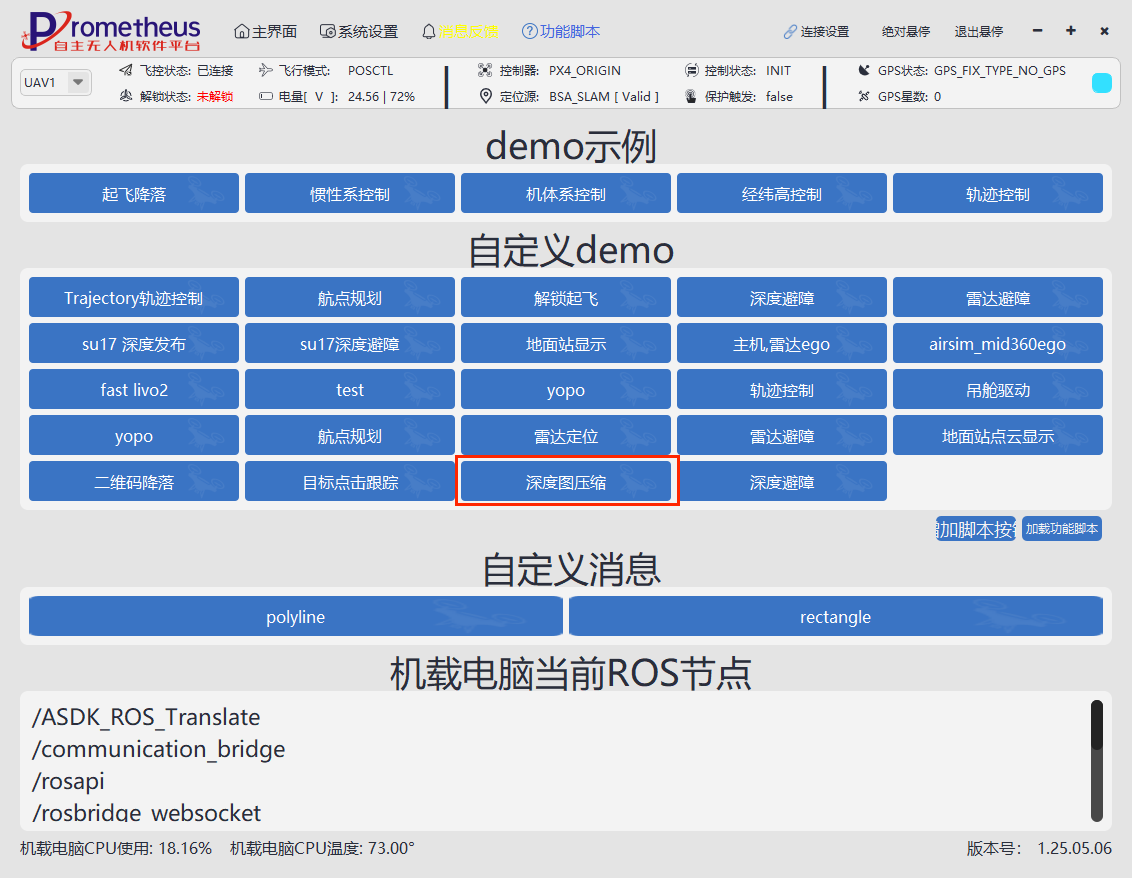
启动深度图压缩
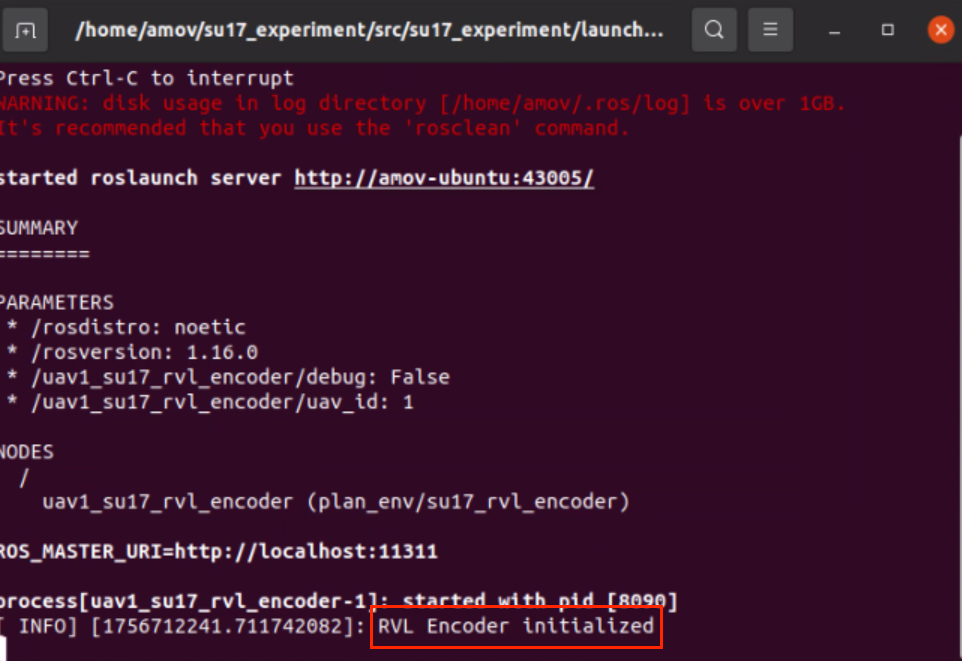
点击功能脚本中的深度图压缩。
查看机载电脑终端,RVL Encoder initialized说明深度图压缩已启动。
YOPO视觉避障
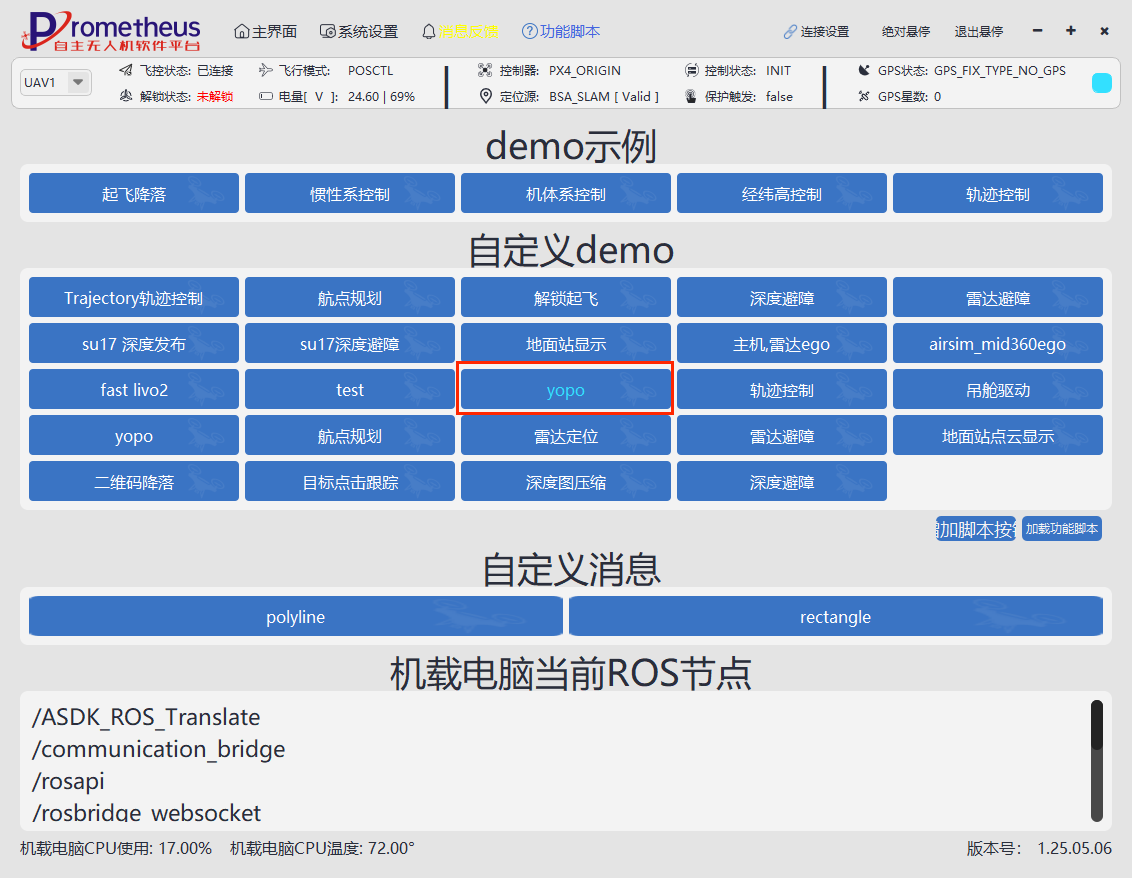
点击功能脚本中的yopo按钮,启动端到端避障功能。
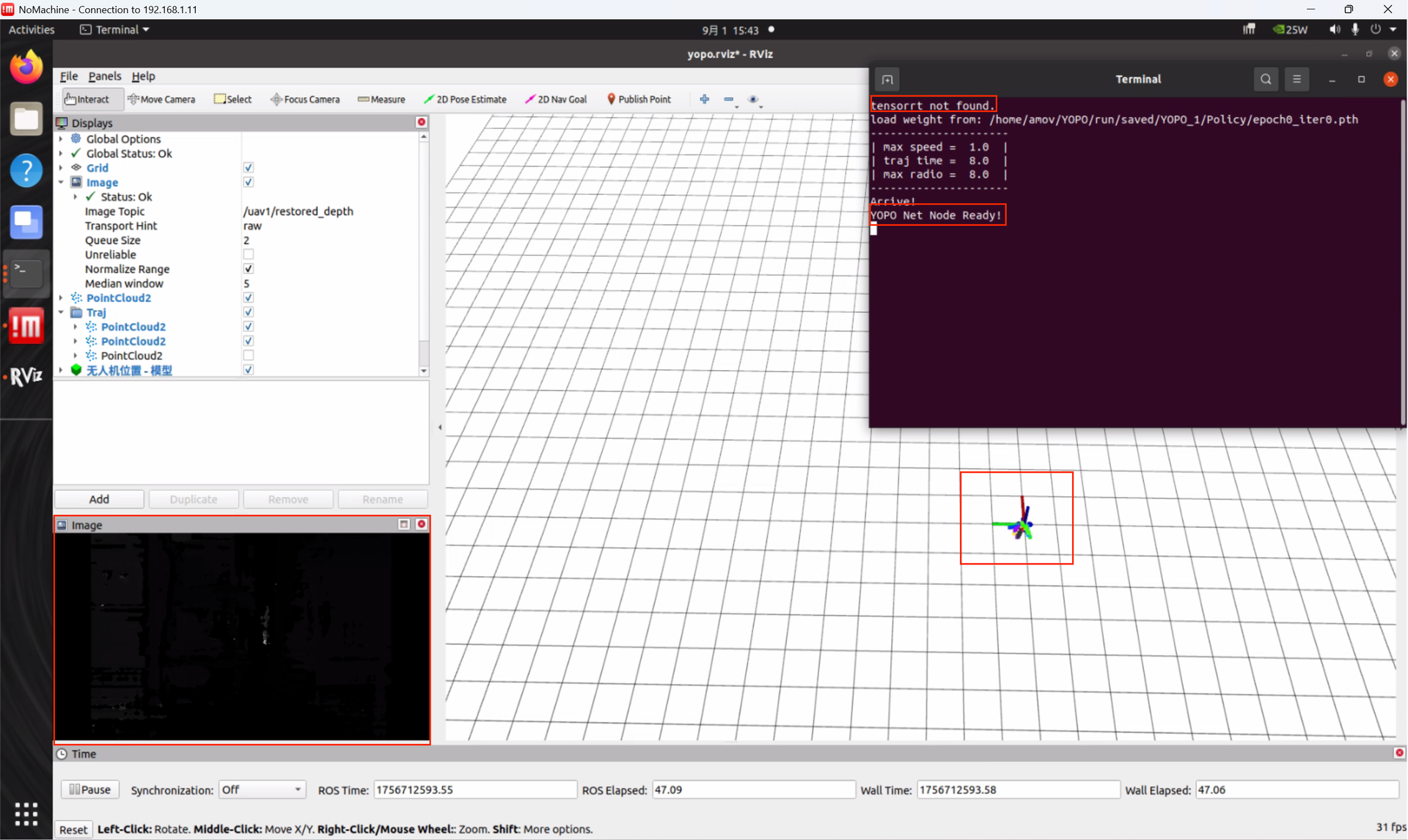
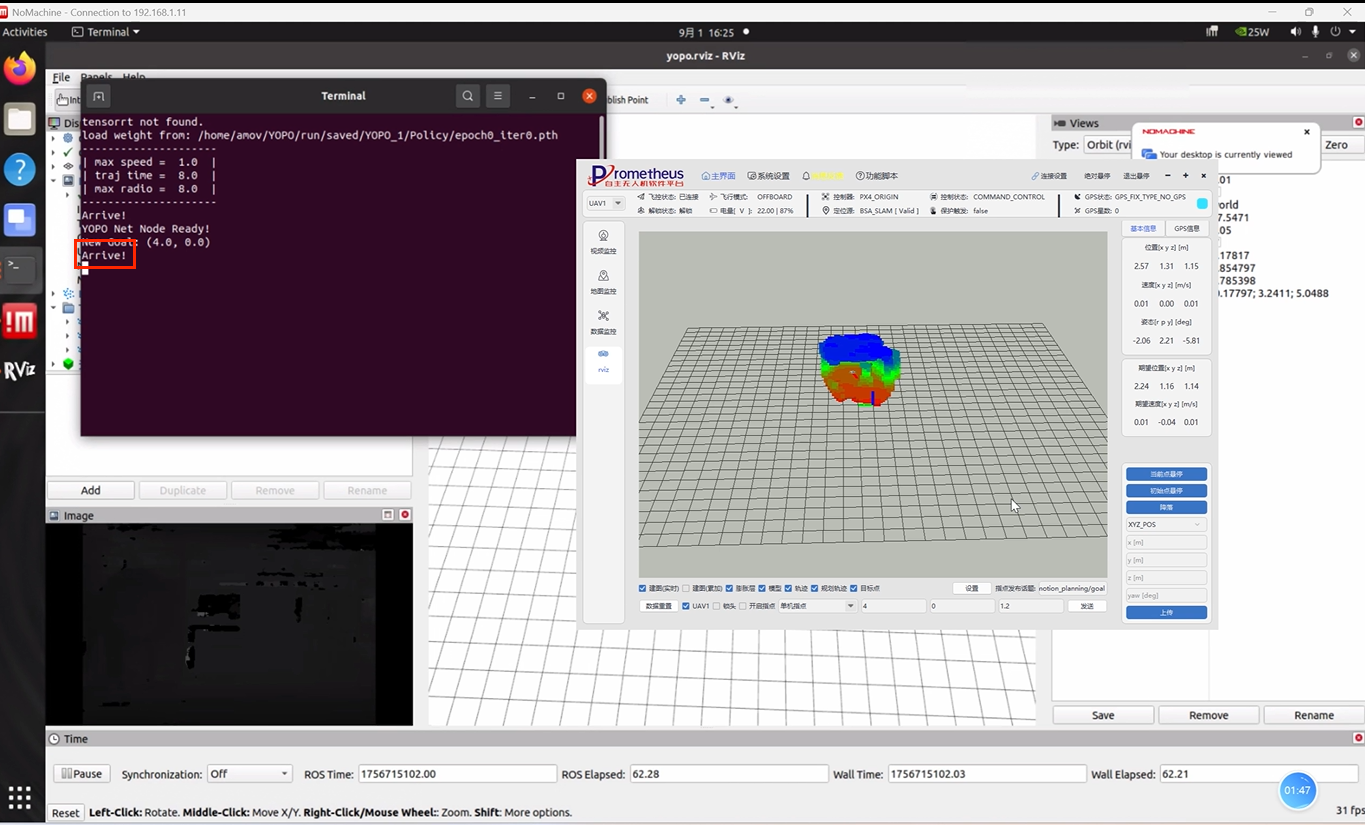
选配包桌面端中会自动打开rviz,当rviz中显示深度图和轨迹,终端中提示YOPO Net Node Ready!时,表明程序正常启动。
tensorrt not found为正常提示,表明现在使用的模型是pytorch格式的,若使用tensorrt模型无该提示。
解锁起飞,遥控器通道六拨到第三段,切换至 COMMEND_CONTRAL模式。
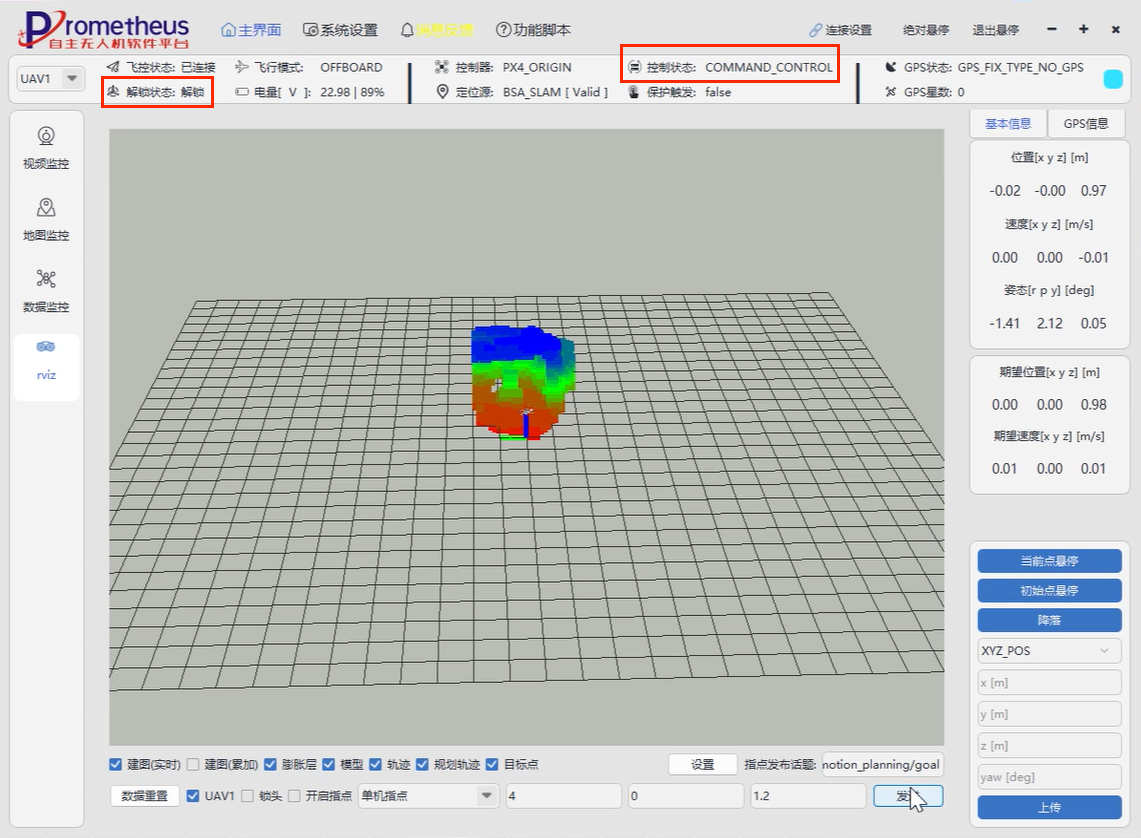
在地面站的rviz中进行给点(需要预估目标点的位置输入后点击发送),点击发送,无人机会根据目标点使用yopo算法进行规划避障。
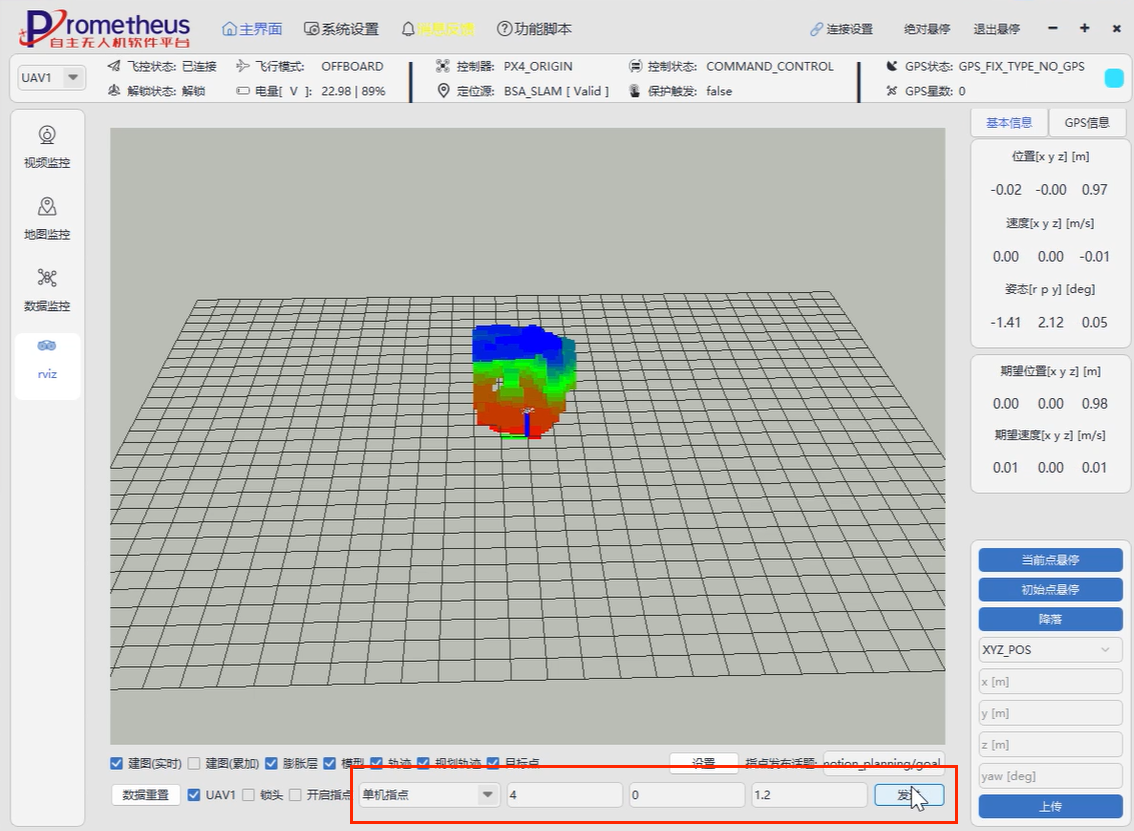
当选配包终端提示 Arrive! 表明无人机已经到达目标点。
在SU17-Orin选配包中,YOPO模块已完成环境配置与系统适配,无需任何额外安装与调试即可直接使用。
不仅方便科研人员快速复现YOPO算法,也为端到端无人机自主导航的研究与实验提供了可靠的平台支持。

如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:
bbs.amovlab.com
有工程师亲自解答
10000+无人机开发者和你共同进步!


