无人机吊挂重物如何稳如老狗?T-ASE成果分享:综合空气阻力建模与鲁棒控制
在无人机空中运输领域,吊挂重物因能保持机动性而被广泛应用,但其在飞行中易受到摆动与风扰影响,控制难度极大。
针对这一挑战,西南交通大学郑志远等人在论文 “Modeling, Robust Control Design, and Experimental Verification for Quadrotor Carrying Cable-Suspended Payload” 中提出了综合空气阻力建模与改进型 UDE+TD鲁棒控制方法,有效提升了四旋翼在风扰和轨迹切换下的稳定性与精度。
该研究发表于国际顶级期刊 IEEE Transactions on Automation Science and Engineering (2025, Vol.22)。
凭借这一成果,郑志远同学获得了阿木实验室校园奖学金活动二等奖5000元。
研究背景
无人机运输重物主要有两种方式:
夹持式:刚性固定重物,增加系统惯性,降低机动性。
吊挂式:用绳索悬挂,保持机动性,但容易产生摆动和受风干扰。
问题在于
传统空气阻力模型(线性/二次形式)在小摆角、低速时难以准确描述重物晃动;
控制器在航点切换或遇到风扰时,容易因输入饱和导致失稳。
如何在多源干扰下保证无人机的稳定性与轨迹精度,是一大难题。
技术亮点
更精准的重物建模
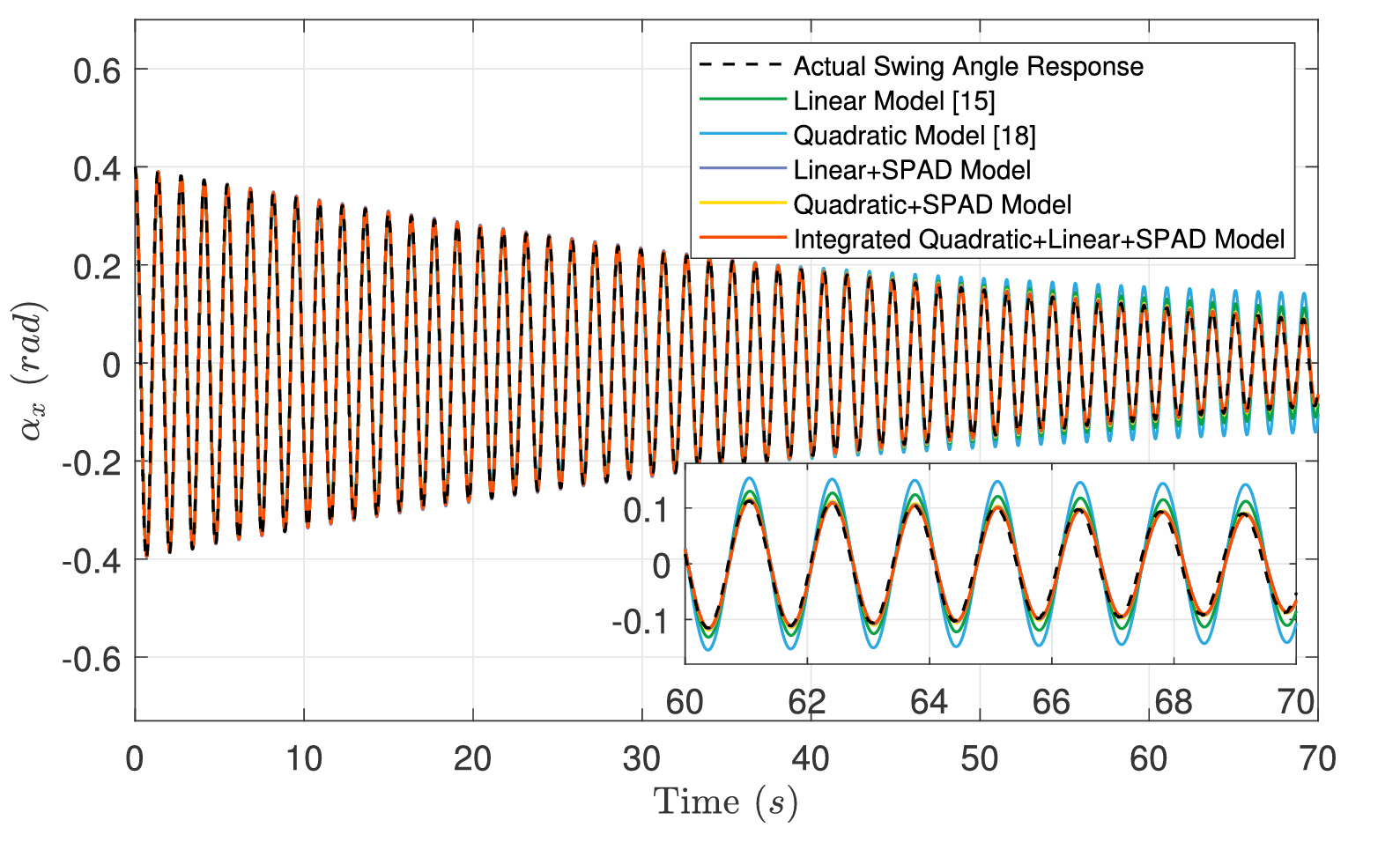
论文提出了一种综合空气阻力模型,在经典模型中加入了 SPAD项(空速依赖零阶阻尼),用来反映绳索摩擦、弹性等非空气阻力因素。在小摆角实验中:加入SPAD后的模型误差仅0.5%
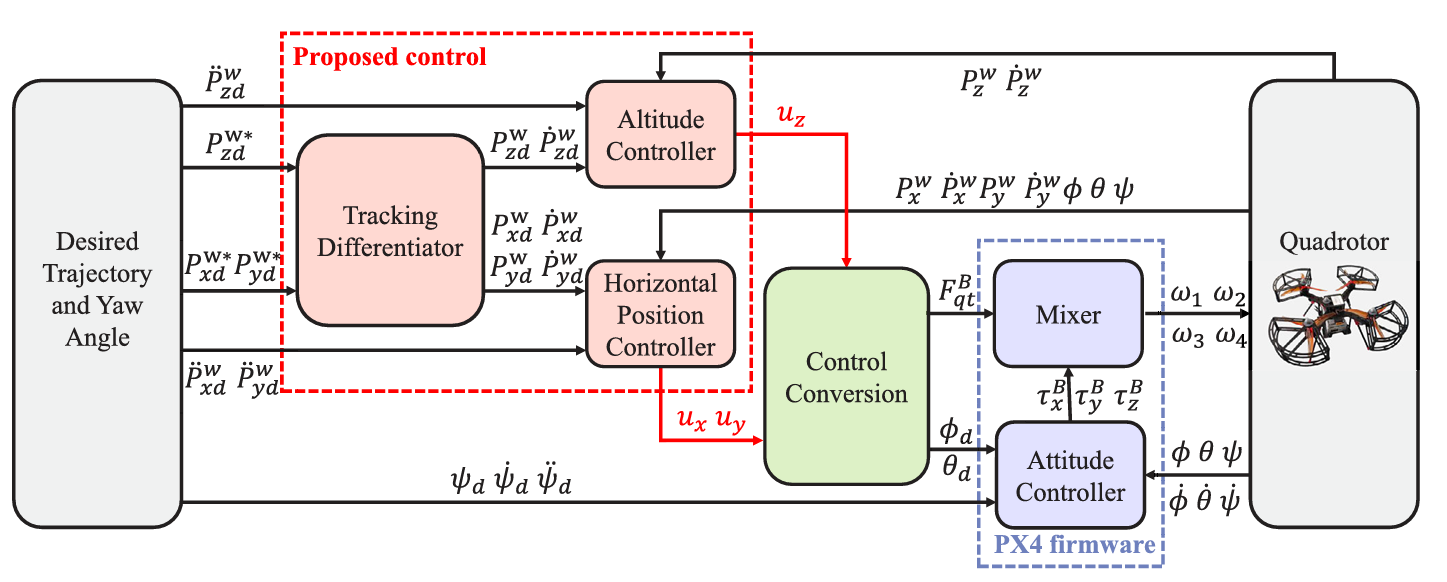
改进的UDE鲁棒控制器
在不确定性与干扰估计器(UDE)基础上,研究者引入跟踪微分器(TD):
平滑航点切换时的阶跃信号,避免控制输入饱和;
在轨迹平滑场景中,可将TD参数调大,保持原参考信号不变。
参数整定方法
基于奇异摄动理论,揭示了 UDE参数T与轨迹跟踪精度/鲁棒性之间的明确关系;
提出了一套简洁高效的调参指南,让控制器更易于工程应用。
实验测试
仿真实验
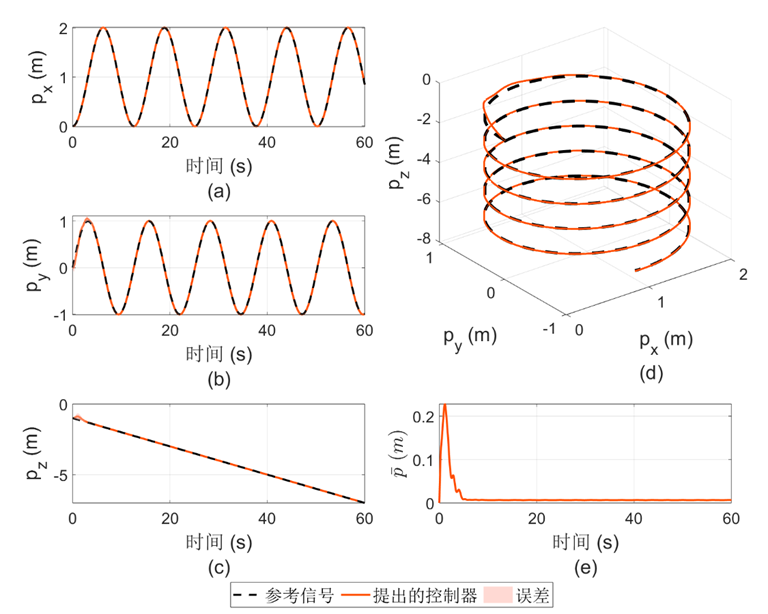
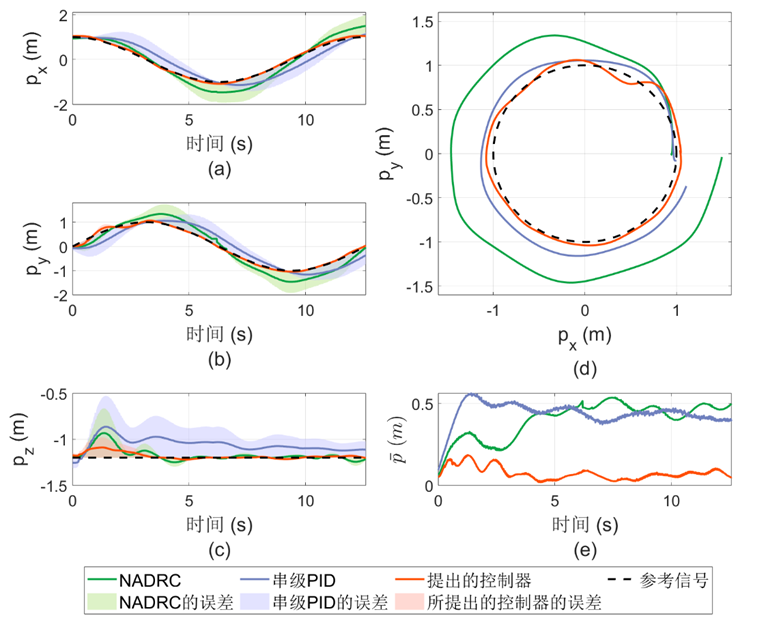
圆轨迹跟踪
在水平面上,UDE控制器能够紧跟参考轨迹;在高度控制上,由于挂载重物导致初始下沉,UDE控制器能快速补偿重力干扰,使轨迹迅速收敛。
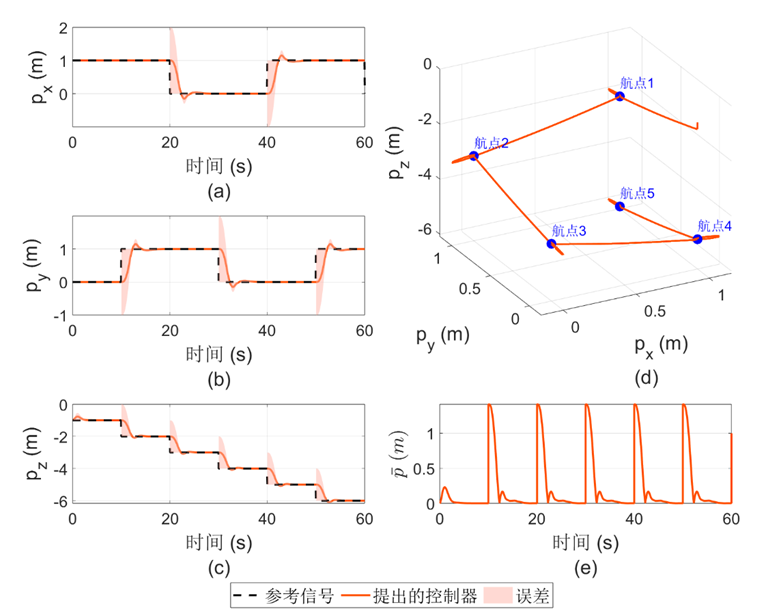
航点飞行
航点切换对应阶跃信号,PID 控制信号易饱和,导致性能下降。
UDE+TD 控制器通过平滑参考信号,显著减小了超调,能在风扰存在下保持较高精度。
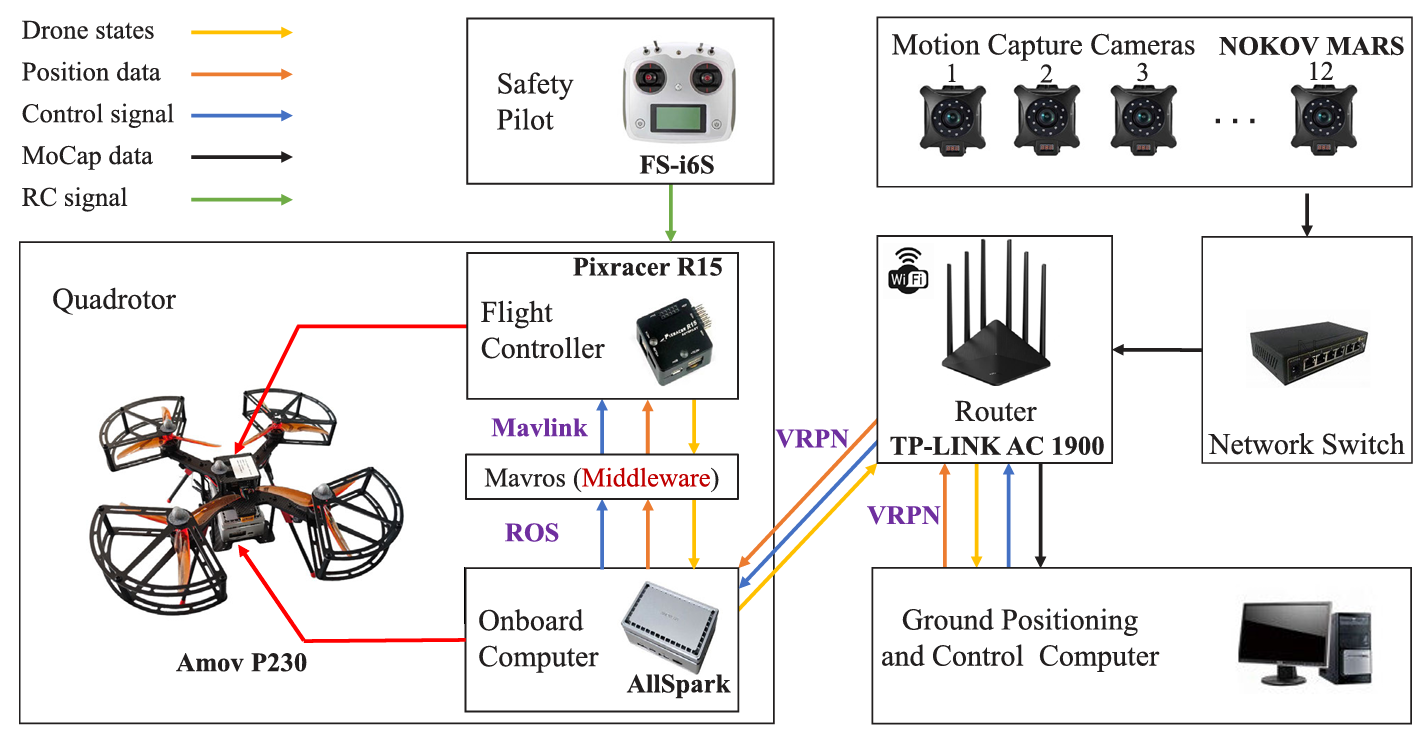
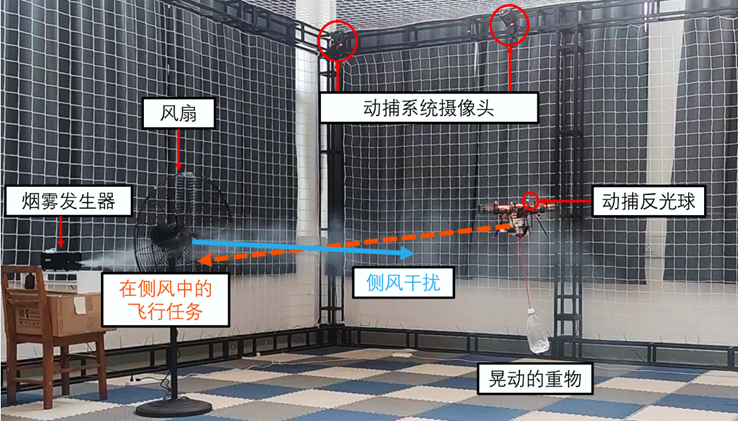
真机飞行
实验平台:
阿木实验室**P230四旋翼+Prometheus开源框架,搭载吊挂负载,在无风、横风、强风**等场景下飞行。
1.重物建模辨识
实验比较了线性、二次、线性+SPAD、二次+SPAD、综合阻力模型。
在小摆角情况下:
线性模型误差 21.8%
二次模型误差 51%
线性+SPAD模型误差仅 0.5%,与综合模型接近,验证了SPAD项的重要性。
2.控制器性能对比
圆轨迹飞行
UDE控制器在水平和垂直方向均保持最高跟踪精度;
PID存在相位滞后,NADRC出现明显超调;
UDE在高度控制上比 NADRC更快补偿掉高现象。
航点飞行(单向风扰)
PID响应快但稳态精度不足;
NADRC收敛慢;
UDE控制器在横风干扰下依旧能保持约0.1m的跟踪精度。
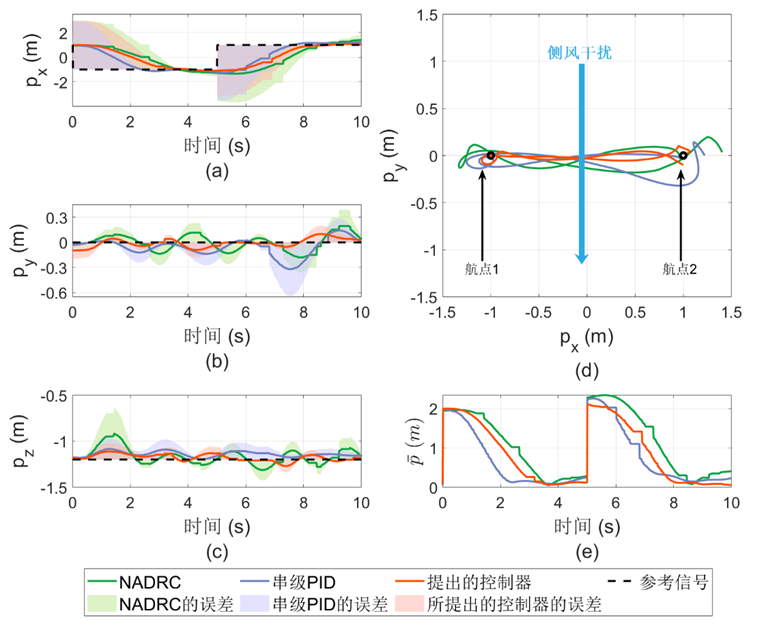
航点飞行(强风干扰)
PID高度跟踪严重偏差,NADRC出现震荡;
UDE控制器表现接近无风场景,抗干扰优势明显。
不同UDE参数T的影响
当T从5降至0.35,轨迹误差逐步减小,与理论分析一致;
相比调整反馈增益 (kp, kd),调节 T 对性能提升更显著,且调参过程更直观。
综合对比
误差指标:UDE 控制器在四种场景下的均方误差显著小于 PID和NADRC。
调参难度:UDE控制器仅需调整4个参数,且T可独立调节,调参简单高效;PID与NADRC参数间耦合度高,多依赖反复试错。
实验总结
UDE+TD 控制器不仅在无风环境下优于其他方法,在强风与重物摆动叠加干扰下仍保持 最高精度与最快收敛。
其核心优势在于:
更**精准的建模**(SPAD项提升小摆角场景下的阻尼刻画能力);
更强的鲁棒性(有效抵抗风扰与输入饱和);
更易调参(参数独立、可量化设计)。
应用场景
这项研究不仅适用于无人机吊运,还可推广到其他存在扰动抑制需求的系统:
应急物资空投
军事运输与投送
农业喷洒与物资挂载
水域采样与测绘
列车/无人艇控制
资源速递
论文链接:
https://ieeexplore.ieee.org/abstract/document/10632105
2025校园奖学金活动
为表彰在开源社区中不断贡献、或在无人机技术领域屡创佳绩的开发者,我们隆重推出校园奖学金活动,旨在激励更多人投身前沿科技,共同开拓无限可能。
活动时间:2025年1月1日-12月31日
活动对象:P230/P450/P600/SU17用户
每个机架号最多可有两名人员获奖
文章内容需基于使用阿木无人机或Prometheus项目
文章需提及Prometheus项目,且在参考文献中引用GitHub主页
需使用官方的引文
详情请查看2025校园奖学金计划火热申报中!
如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:
有工程师亲自解答
10000+无人机开发者和你共同进步!


