SU17-Orin选配包上线!让你的飞行系统拥有第二大脑
在无人机从“能飞”向“会飞”加速演进的今天,算力就是生产力。为满足高算力任务与前沿算法部署等需求,我们推出SU17-Orin选配包,搭载NVIDIA Jetson Orin NX核心模组,为SU17无人机赋予强大的边缘计算能力。既能支撑复杂环境下的自主避障、路径规划等功能,也为高阶智能算法的实机验证提供坚实基础。

01 核心优势
算力更强
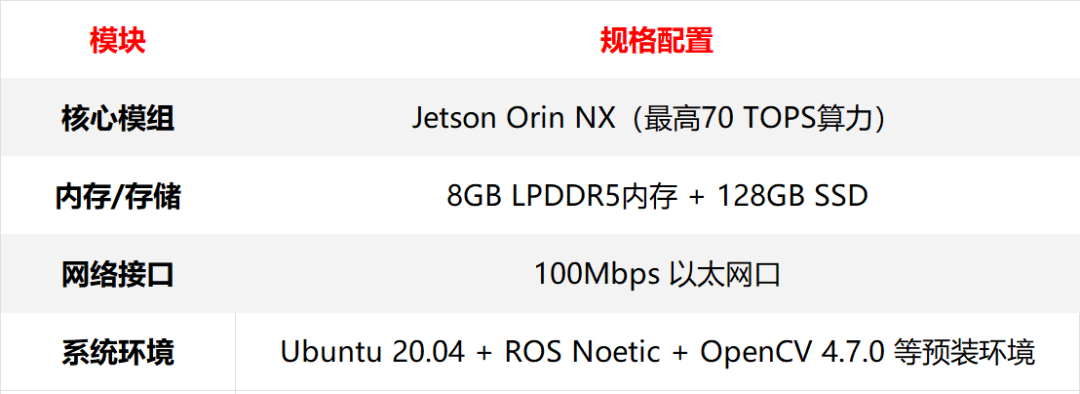
配备 Jetson Orin NX,算力高达70TOPS,可高效处理图像识别、目标跟踪、深度学习推理等任务。
搭载 8核 Arm Cortex-A78AE CPU 与 1024核 Ampere架构 GPU(32个Tensor Core),为多线程调度和深度计算提供强劲支撑。
实时避障
与 SU17原生四目VIO视觉定位系统无缝集成,基于EGO-SWARM算法实现厘米级深度避障。
无论是密集室内环境还是复杂户外地形,均可实现稳定避障与路径调整,保障飞行安全。
即插即用
- 通过6PIN连接线对接ETH+VCC接口,可快速接入SU17系统,无需额外调试。

- 整体重量仅 130g,轻巧设计几乎不影响飞行性能。
开发者友好
内置 Ubuntu 20.04系统,预装 ROS Noetic、OpenCV 4.7.0 等常用工具。
完美兼容Prometheus无人机开源框架,支持快速搭建从感知到控制的完整智能飞行流程。
02 技术配置
该选配包深度集成 Prometheus 无人机软件框架,内置完整的路径规划与自主飞行方案。结合EGO-SWARM算法,可实现智能避障与全局最优路径生成,支持开发者快速构建覆盖环境感知—决策规划—运动控制的完整智能飞行系统。
适用场景
高校及科研机构:高算力任务与前沿算法部署;
高精度三维建模与实时感知;
复杂环境下的自主飞行等。
03 前瞻预告
适配FAST-LIVO2
SU17平台将集成香港大学MaRS实验室开发的FAST-LIVO2算法,通过激光雷达、IMU与视觉的紧耦合,实现更高精度、更强鲁棒性的SLAM系统。SU17-ORIN的算力与显存可显著提升建图实时性与可视化质量,为复杂任务提供全链路支撑:
实时渲染建图效果,提升操作者对环境的理解;
分担路径规划与感知模块负载,增强SLAM核心的实时响应。

产品wiki:https://monojson.com/s/AsGBT
扫码联系我们,获取产品更多信息

如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:bbs.amovlab.com
有工程师亲自解答
10000+无人机开发者和你共同进步!


