IEEE论文分享:分层地图与多子图协同的无人机自主探索新方法
在未知环境中,无人机自主探索常面临路径冗余、重复进入等效率瓶颈。苏州大学机电学院郑天超等人提出了一种基于多子图探索策略与Octree-拓扑混合地图的分层路径规划方法,结合局部-全局协同与轨迹优化,有效减少了路径拐点和飞行距离,并在Prometheus仿真平台及真机实验中得到验证。该论文已被机器人与仿生领域国际会议IEEE ROBIO 2024正式收录,并获得了阿木实验室校园奖学金活动三等奖2000元。
01 研究背景
在地下车库、灾后建筑等无先验环境中,旋翼无人机需依靠感知传感器和机载计算机实时建图与决策。传统基于单栅格地图的全局搜索随着地图扩张易产生重复往返,搜索空间指数级膨胀、转弯节点激增。在计算资源受限的条件下,如何缩短探索时间与轨迹长度,成为自主探索领域面临的重要挑战。

02 方法概览
为解决传统探索算法中路径重复和效率下降的问题,论文针对搭载深度相机的旋翼无人机,提出一种基于多地图协同的分层路径规划方法。算法结合局部网格与拓扑混合地图,分别用于局部回溯路径生成与全局拓扑路径规划。通过“点转线”优化策略,有效减少路径拐点与长度。
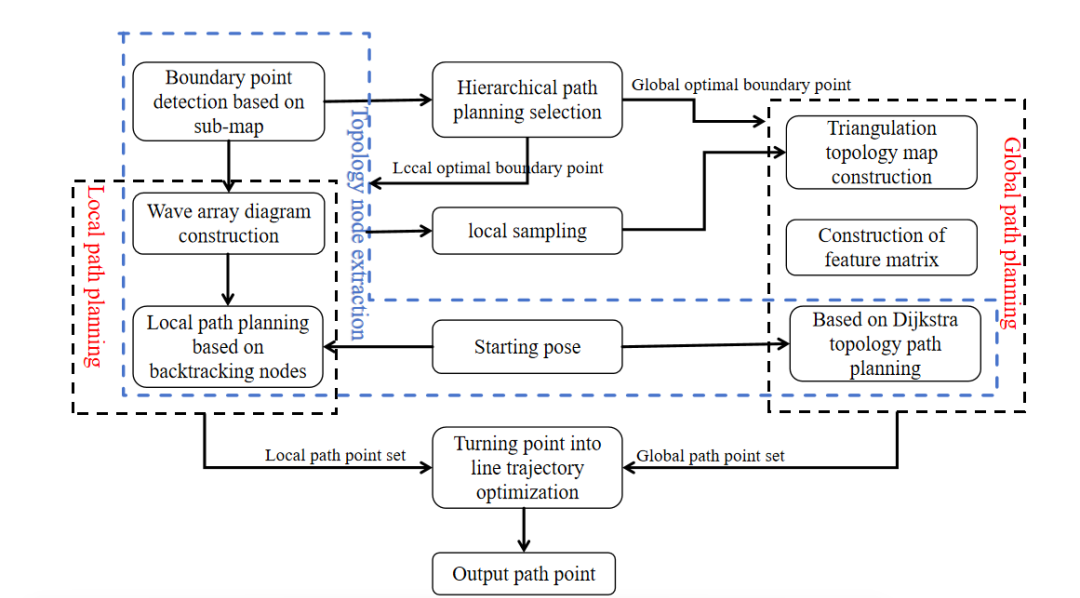
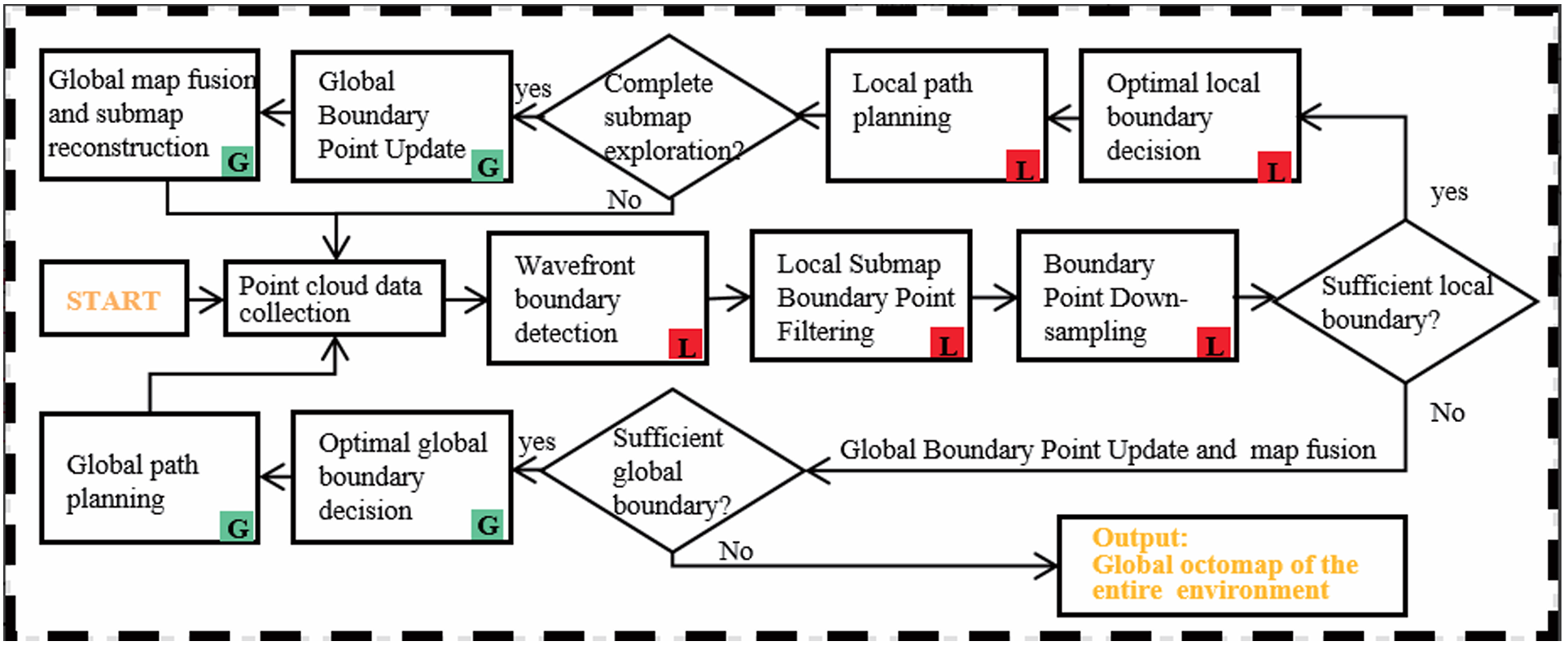
多子地图协同探索策略
使用多分辨率多地图结构:局部地图(高分辨率)用于精细规划,全局地图(低分辨率)指导子图方向;
子图构建状态作为任务进度依据,避免重复探索。
子图面积作为探索完成指标,防止无效重访;
优化边界搜索策略:子图内执行波前边界检测,减少边界点搜索范围与频率;
信息增益评估优化:不仅考虑单点信息量,还结合其空间分布决定探索优先级。
局部路径规划
构建八叉树子图,空闲网格值初始化并进行波前扩散,形成波阵图;
基于波阵值进行回溯路径规划,选择波阵值最小的邻近节点;
引入代价评估函数(起点到节点距离 + 节点到目标距离)以解决波阵值相等时的路径随机性;
最终获得一条从当前点到目标边界的最短可行路径。
全局路径规划
动态提取探索过程中的关键节点(如子图中心、历史路径拐点)作为拓扑图节点;
利用Delaunay三角剖分+碰撞检测构建无障碍连通边,生成稀疏拓扑图;
构造特征矩阵存储节点之间的欧几里得距离(非邻点设为∞);
使用Dijkstra算法在拓扑图上搜索无人机当前位置到全局最优边界点的路径。

左图为局部规划结果,右图为全局规划结果
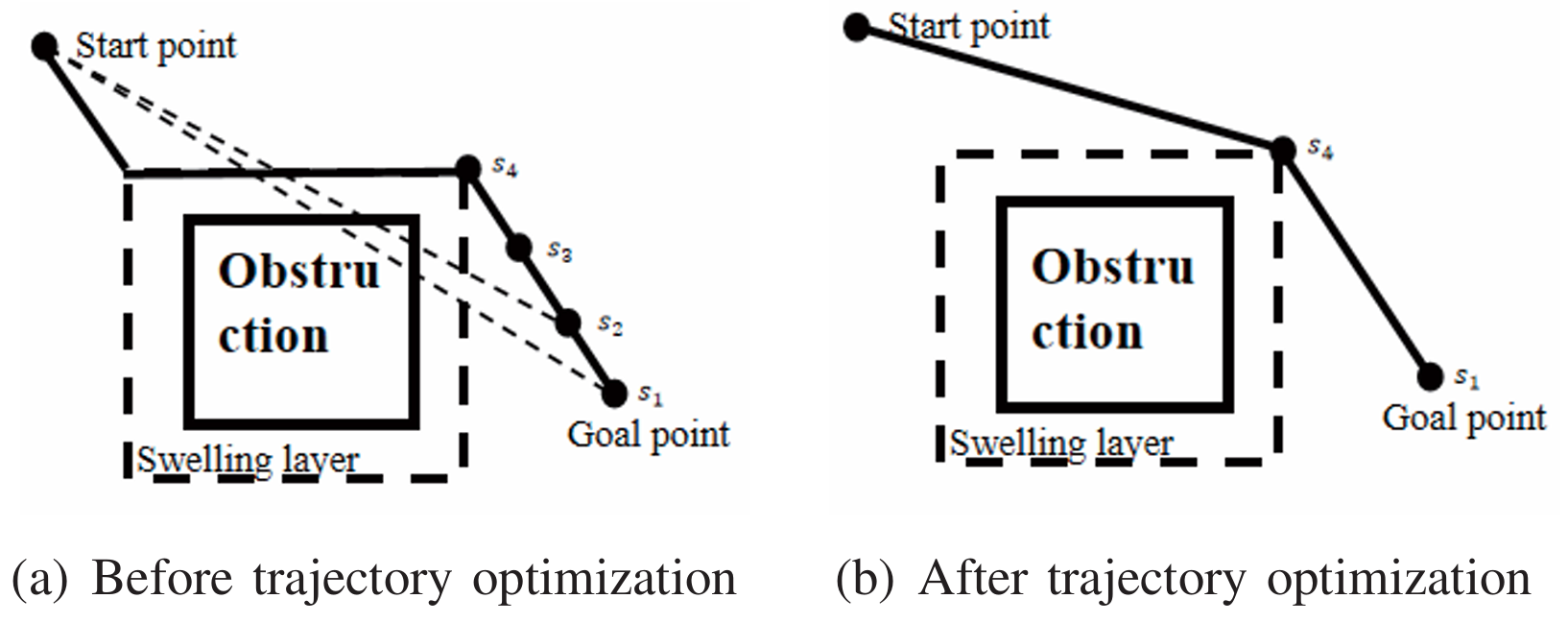
路径轨迹优化:转折点线段化
检测路径中任意两点间是否存在通视空间;
若无障碍物阻挡,则删除中间所有拐点,保留首尾两点作为一段直线路径;
对整条路径多段迭代处理,将折线路径简化为更平滑的直线段序列。
技术亮点
融合式路径规划框架:采用“局部细规划 + 全局引导”的分层结构,在精度与效率间实现动态平衡;
多子图协同探索机制:提升目标区域分辨率,降低整体地图维护代价,防止重复探索;
轨迹优化策略高效可靠:通过“转折点化直线”显著减少路径转折数与总长度,提升飞行安全与稳定性;
稀疏拓扑图+特征矩阵建模:相比传统全图路径规划方式,存储与检索效率更高,支持大规模环境下的快速路径生成;
目标边界点选择更智能:信息增益评估策略融入空间分布考虑,更合理安排探索顺序。
03 仿真/真机实验
实验平台
硬件:
阿木实验室P230四旋翼无人机,搭载Intel Realsense D435i深度相机、Jetson Xavier NX处理器等。

软件:Prometheus开源平台
实验室场景
在障碍物密集的小型实验室场景中(6mx7.8m),测试发现轨迹优化后:
局部路径转弯点从 4 个减少到 2 个;
路径长度从 5.24m 减少到 5.01m。

地下车库场景
在光照不均、无GNSS的弱纹理环境中(42mx15m)测试发现:
全局路径优化后转弯点从 7 个降至 2 个;
路径长度从16.79m缩短为14.36m;
拓扑图路径规划节点仅为网格图的 0.7\%,规划时长降低 34\%。

资源速递
论文链接: https://ieeexplore.ieee.org/abstract/document/10907525
2025校园奖学金活动
为表彰在开源社区中不断贡献、或在无人机技术领域屡创佳绩的开发者,我们隆重推出校园奖学金活动,旨在激励更多人投身前沿科技,共同开拓无限可能。
🕛 活动时间:2025年1月1日-12月31日
✔ 活动对象:P230/P450/P600/SU17用户
🔹 每个机架号最多可有两名人员获奖
🔹 文章内容需基于使用阿木无人机或Prometheus项目
🔹 文章需提及Prometheus项目,且在参考文献中引用GitHub主页
🔹 需使用官方的引文
详情请查看2025校园奖学金计划火热申报中!
开发遇到棘手难题可以上阿木官方论坛:bbs.amovlab.com
有工程师亲自解答10000+无人机开发者和你共同进步!


