起飞就炸机?三步教你有效避免!
你是否有过视觉无人机起飞即炸机的尴尬经历?
没关系,三分钟看完本文,教你有效避免无人机起飞即炸机!
什么是视觉无人机?
视觉无人机是指利用摄像头等视觉传感器,进行环境识别和定位的无人机,能够实现自主导航和避障等功能。视觉无人机实现定位的原理主要基于计算机视觉和图像处理技术,通过图像捕获,特征提取,特征匹配与定位,运动估计,地图构建与更新等步骤,依赖复杂的算法,同时定位与地图构建(SLAM)等,使得无人机能够在没有GPS信号的室内或复杂环境中实现自主定位和导航。
要怎样去避免起飞即炸机呢?
起飞即炸机的原因
1、震动导致T265双目相机发散;
2、光线或者环境问题导致定位发散;
3、视觉定位系统在起飞前可能未正确初始化或者校准,导致无法准确捕捉和解析环境数据。
我们以阿木实验室的P450无人机为例,来给大家逐一讲解一下如何避免这些问题。其他的视觉定位无人机的原理也是大同小异的,大家可以参考。
震动
无人机的震动会导致 T265 相机视觉定位发散。震动导致无人机视觉定位发散,主要是因为震动引起的图像模糊和特征点匹配错误,影响了定位精度。所以在安装双目相机的时候,可以考虑用有更好减震效果的软连接和代替硬连接。P450无人机采用的就是这样一个带有减震球的支架,可以有效地减少震动。
“如果您对这款支架感兴趣,我们也提供现成的产品。欢迎在评论区留言,我们将会私信联系您。”
光线导致的定位发散

众所周知,光线或者环境必然会导致视觉定位发散,这可以从算法上进行一些优化,但是却很难完全避免。尤其是在一些全新的环境或者光线比较复杂的情况下。我们建议的方式是采用光流和双目相机进行冗余定位 以 P450 为例,除了 T265 相机,我们还在机身下方安装了光流相机,当 T265 定位发散时,算法定位会自动切换定位源到光流相机,确保飞行的稳定。具体的算法逻辑,如果大家想知道,请在视频下发评论或者发弹幕,我们会私信给大家。
初始化和校准问题
初始化和校准问题也是造成视觉无人机起飞即炸机的重要原因。
下面我们来给大家演示一下拿到新的无人机或者到一个全新的环境中,需要如何初始化和校准无人机。
连接上机载电脑后,在桌面有一个sensor_inspect文件夹,里面存放的就是单传感器的检测脚本。
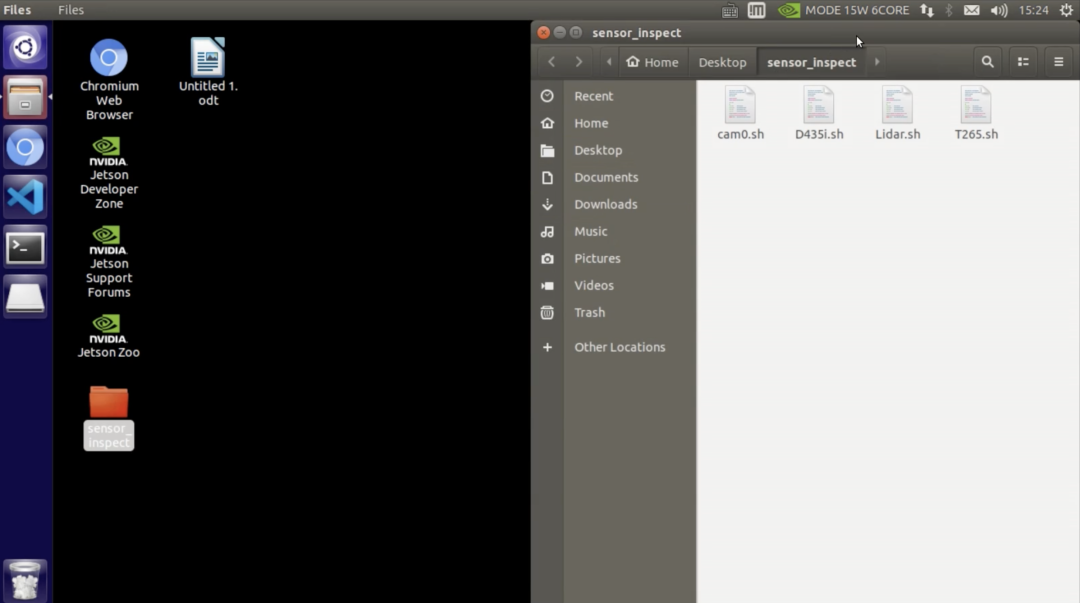
其中四个脚本从左到右分别为单目、D435i、雷达、T265的检测脚本,打开一个新终端,将单目检测脚本拖进去,运行。
接下来我们进行数据检测
单目相机工作正常;
D435i深度相机工作正常;

雷达工作正常;
T265 双目相机工作正常;

完成上述三大步骤,基本上就可以避免起飞即炸机的尴尬了。
此次实验使用的是阿木实验室即将上架的P450旗舰版无人机,基于Prometheus开源项目,提供丰富的Demo例程,涵盖控制模块、SLAM模块、规划模块以及目标检测模块等多个无人机及机器视觉相关研究方向。如果您想了解该产品更多技术信息,欢迎与我们联系。