聊一聊EGO-Planner膨胀系数的大小对无人机避障飞行的影响
EGO-Planner简介
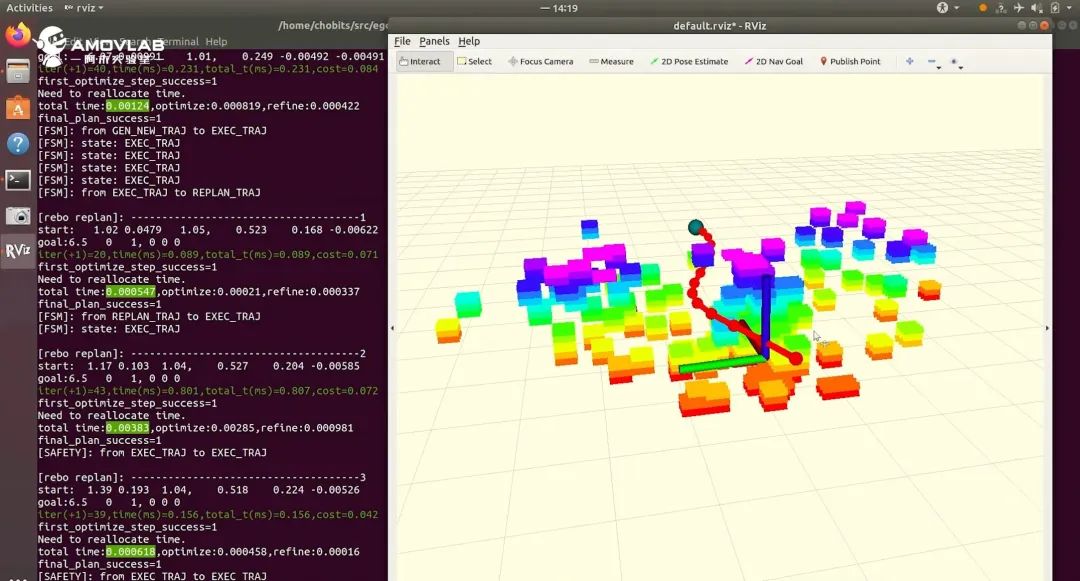
EGO-Planner作为业界知名的无人机轨迹规划算法,其优势在于能够在复杂环境中快速规划出安全、平滑且动态可行的飞行轨迹。在这个算法中,膨胀系数发挥着关键作用。它通过扩大障碍物的感知范围,提供额外的安全边距,避免潜在的碰撞风险。
为了深入理解膨胀系数的影响,我们在阿木实验室的动捕房内进行了一项实验。实验使用的是配备室内视觉SLAM定位和自主规划避障功能的P250旗舰版无人机。实验场地布置了直径约40厘米的柱子和堆叠的纸箱作为障碍物。
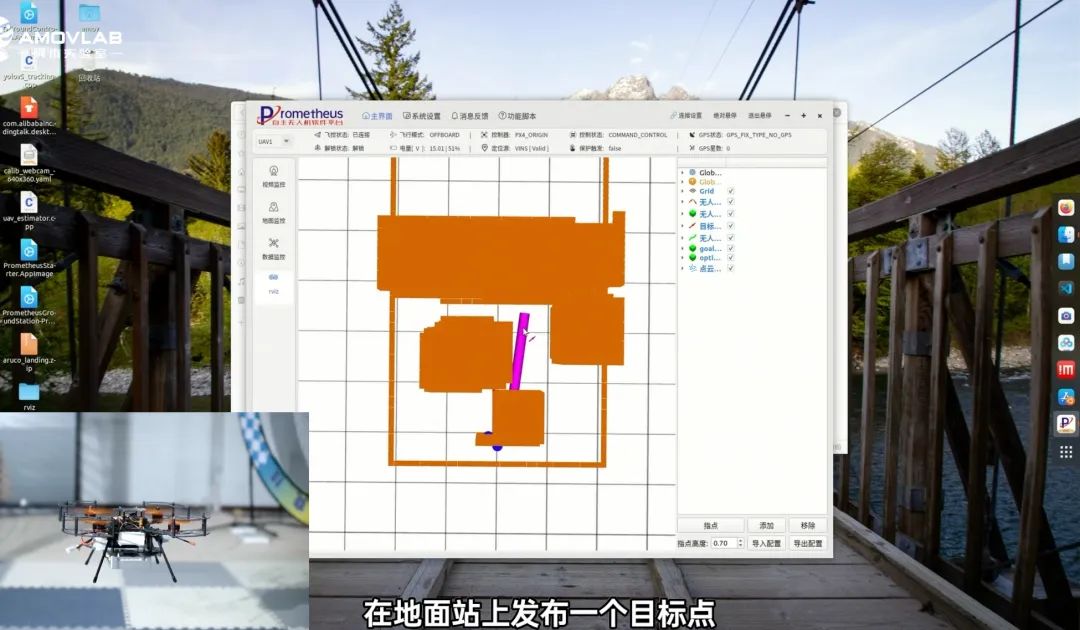
我们来对比一下不同膨胀系数对无人机飞行路径规划的影响。
视频展示:EGO-Planner膨胀系数的大小对无人机避障飞行的影响
实验过程
实验过程中,我们先将膨胀系数设置为0.4。结果显示,虽然无人机起飞后飞行平稳,但因膨胀系数过大,障碍物间的空隙太小,导致无人机无法规划出有效的飞行路径,只能悬停。
随后,我们将膨胀系数调整至0.3,无人机顺利起飞,然后灵活地绕过障碍物,平稳地到达目标地点。

这个实验清楚地展示了膨胀系数对无人机飞行性能的影响。较高的膨胀系数虽然增强了飞行安全,但也限制了无人机的灵活性。相反,适当降低膨胀系数可以在保障安全的前提下,提高无人机的飞行效率和路径规划的灵活性。
实用建议
大家在进行飞行任务时应根据实际环境灵活调整膨胀系数。在环境较为开阔时,可以适当降低膨胀系数以提高效率;在环境复杂或视野受限的情况下,适当增加膨胀系数以确保飞行安全。
在EGO-Planner算法的应用中,选择合适的膨胀系数至关重要。膨胀系数不是一成不变的,而需要随着环境中障碍物的不同特征而灵活调整。在实践中,我们鼓励用户根据具体环境,细致地测试和调整膨胀系数。
通过这样的精准配置,不仅可以深入验证和优化算法的性能,还能确保无人机在各种环境中实现稳定且高效的避障飞行。
采用的硬件

此次实验使用的是阿木实验室的P250旗舰版无人机,基于Prometheus开源项目,提供丰富的Demo例程,涵盖控制模块、SLAM模块、规划模块以及目标检测模块等多个无人机及机器视觉相关研究方向。如果您想了解该产品更多技术信息,欢迎与我们联系。

阿木实验室:为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
课程助手:jiayue199506 (领取免费资料包)
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。


