五分钟学会FMT飞控航点飞行!
什么是航点规划飞行?
开源无人机的航点规划飞行功能是一种允许开发者预先设定一系列地理位置(航点)来指导无人机飞行的功能。这项功能通常在各种开源无人机飞行控制软件中可用,如PX4、ArduPilot和Firmament等。
在航点规划飞行中,开发者可以通过地面站软件预先规划无人机的飞行路径,并设置相关参数,如航点位置、高度、速度等。一旦飞行任务被上传到无人机,无人机便能够按照预定的航线自主飞行并执行任务,无需开发者实时手动控制。
航点规划飞行是开源无人机的基础功能,也是初学者必学的入门功能之一。今天我们以搭载ICF5飞控的MFP450基础款无人机为例,给大家讲解在FMT飞控系统下的航点飞行功能。
Firmament (FMT) 是一款基于模型设计 (Model Based Design, MBD) 的开源自驾仪,可被用来快速构建无人机,车,船,机器人等的无人控制系统。基于模型设计已经被广泛应用于汽车制造、航空航天等行业,当前采用基于模型设计模式开发的飞控系统凤毛麟角,而 FMT 就是为此而诞生。FMT结合当前最先进的基于模型设计和3D仿真技术,构建了从嵌入式软件,建模与仿真三位一体的软件开发平台,致力于打造下一代的开源自驾仪系统。
公众号:阿木实验室FMT正式版,发布倒计时!
操作步骤
1、开机与设备配对
首先,我们需要为无人机接通电源。然后启动Mini Homer地面端电源并接通网线,并与QGC地面站进行配对连接。
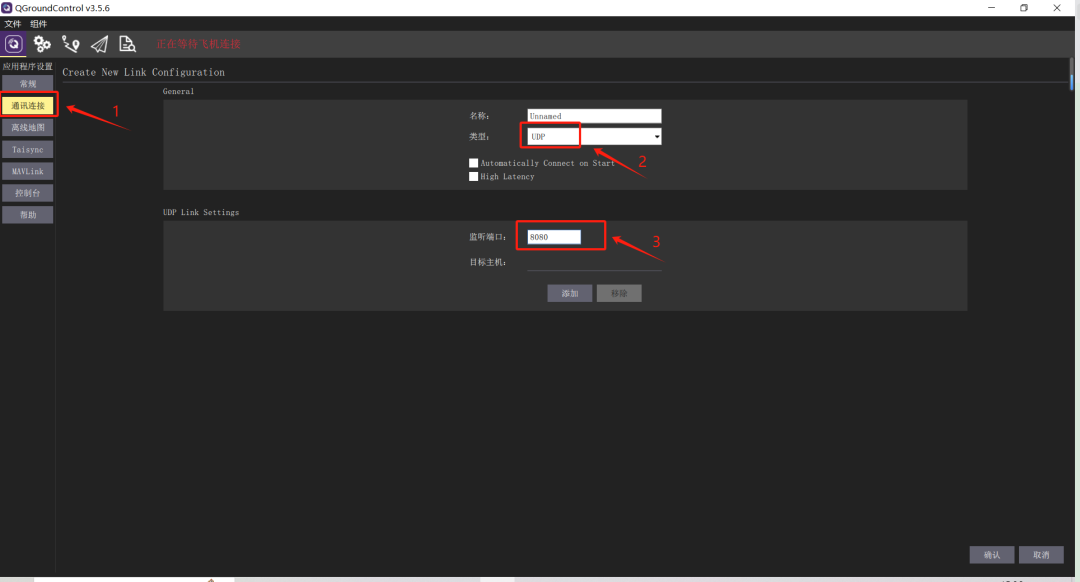
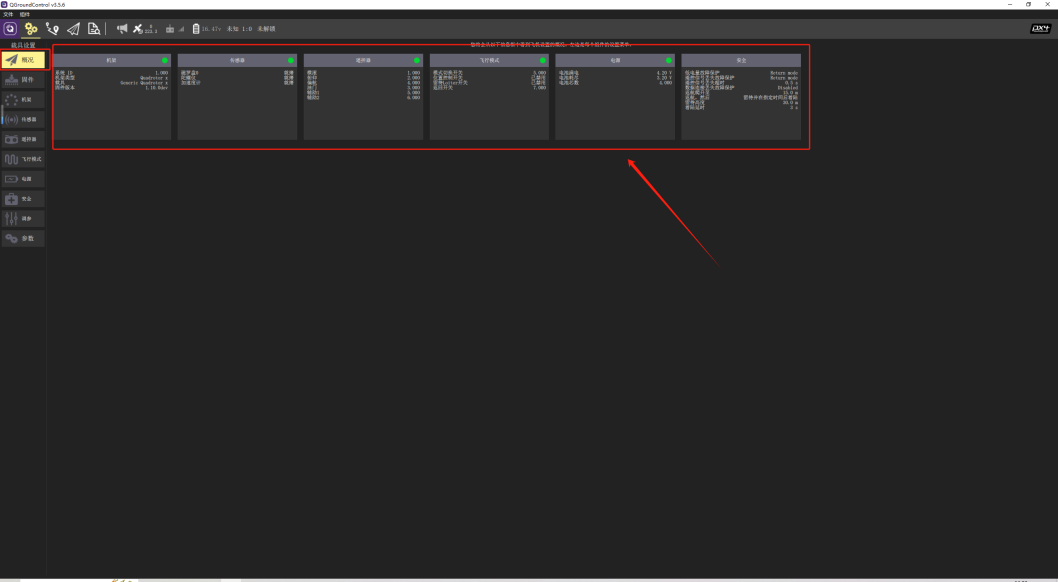
进入地面站通讯连接页面,连接Mini Homer图数传。打开设置页面状态栏,查看无人机数据是否正常,绿色小圆点代表正常。
2、航线规划
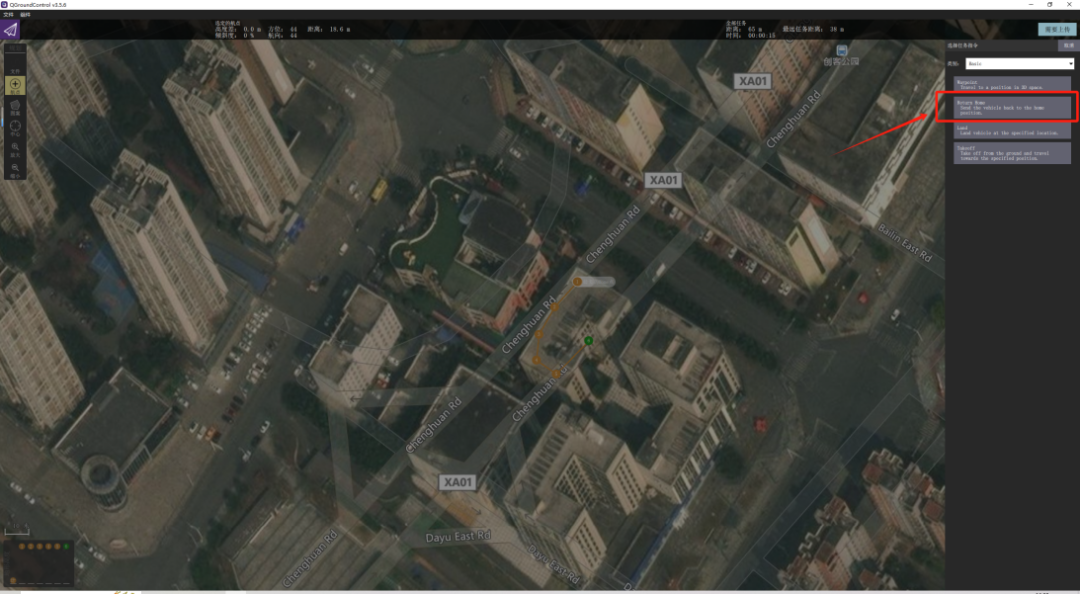
打开航线规划页面,在此页面上,我们将为飞行任务添加6个航点。请注意,最后一个航点设定为返航点,以确保无人机能够安全返回起始位置。
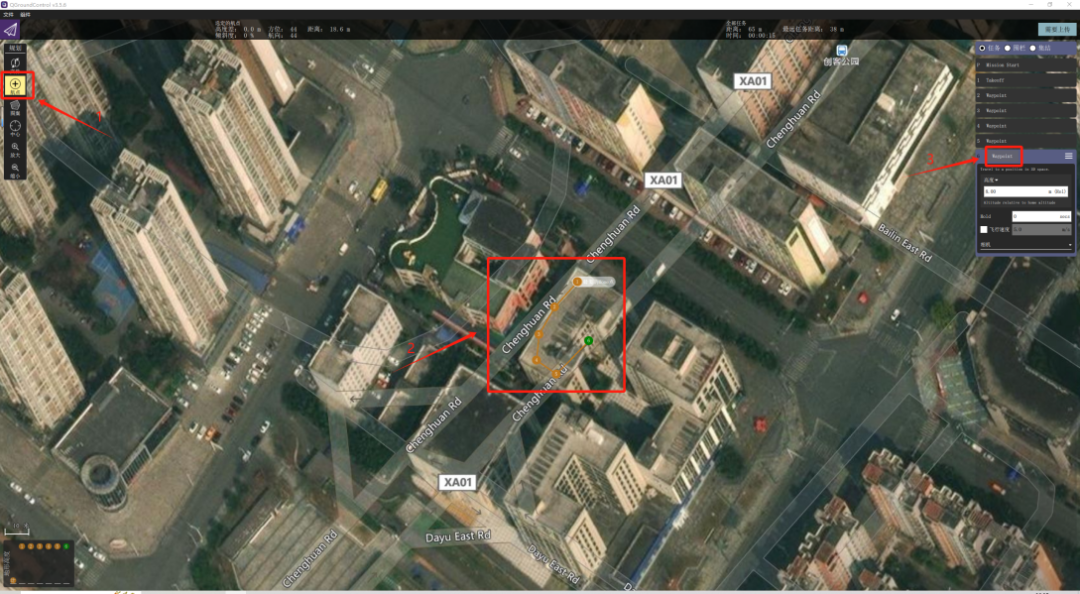
在航点规划的同时,上方可查看选定航点的方向、航向和距离,还能查看全部任务的距离和最远航点距离,以及飞行时长。

3、高度设置
点击Mission Start,进入高度设置环节。在这里,您可以为整个航线设置巡航高度,例如10米。如有需要,也可以单独点击某个航点设置高度,这里我们设定第三个航点飞行高度为8米。


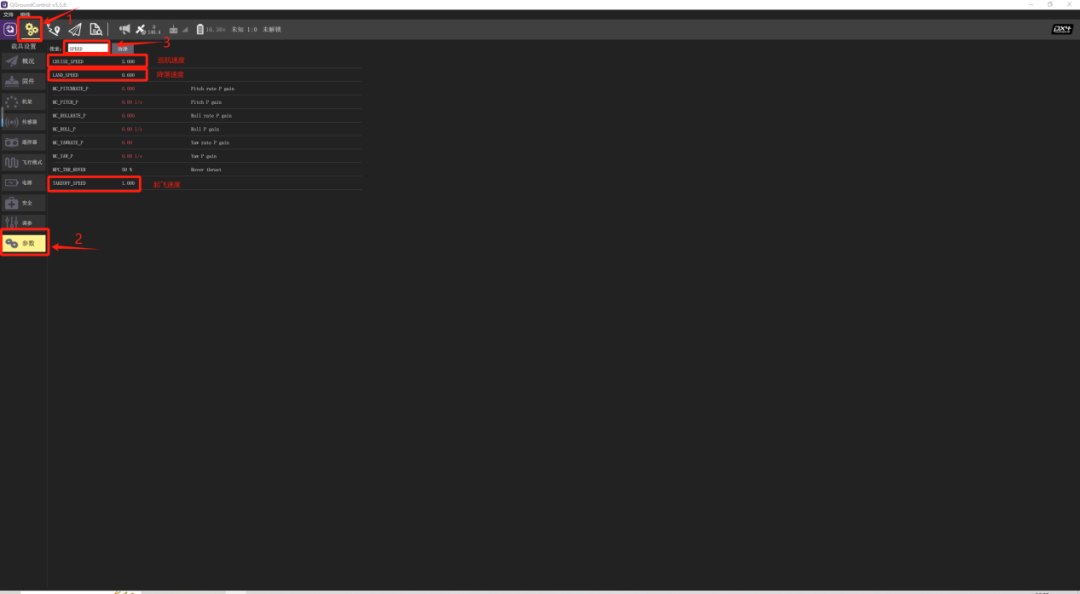
4、速度参数配置
在设置菜单中找到参数部分,此界面可以配置CRUISE SPEED(巡航速度)、LAND SPEED(降落速度)和TAKEOFF SPEED(起飞速度),根据您的飞行需求进行相应的调整。
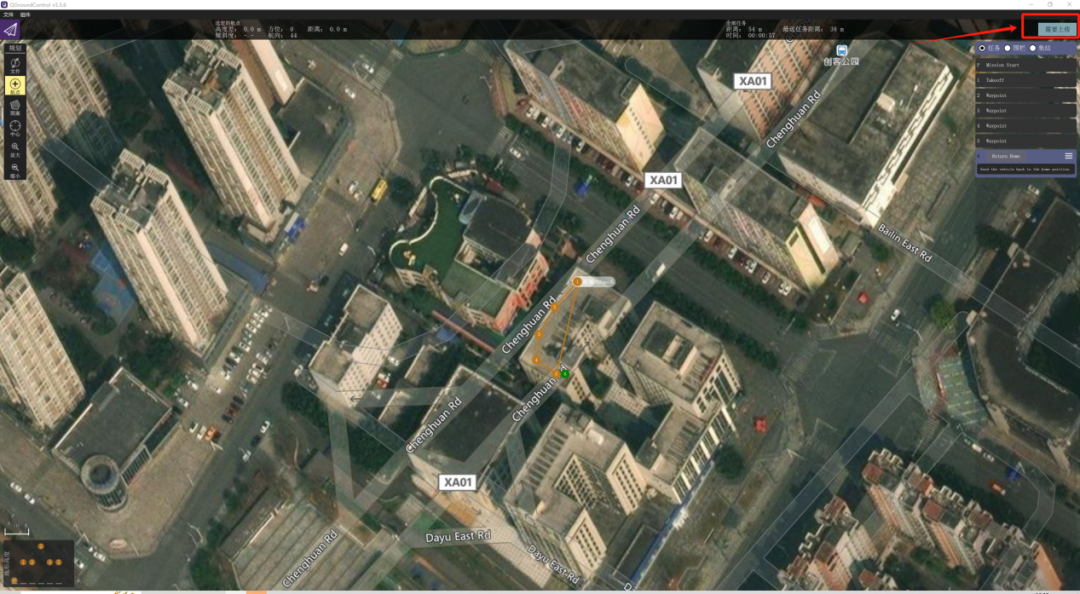
5、上传飞行任务
在完成上述设置后,您需要上传飞行任务,确保无人机的实际飞行将按照您所设置的路线进行。
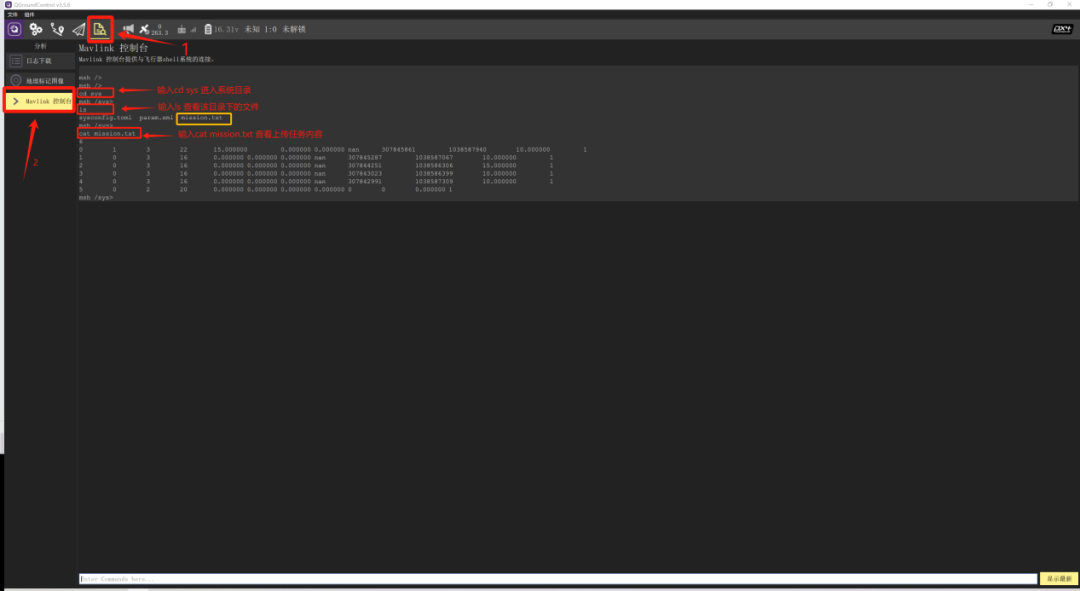
6、Mavlink控制台操作
为了验证飞行任务是否成功上传,可以打开Mavlink控制台。首先输入“cd sys”以进入系统目录,然后输入”ls”查看该目录下的文件。如需查看任务文件的内容,请输入“cat mission.txt”。通过这些操作,您可以确认飞行任务是否正确上传。
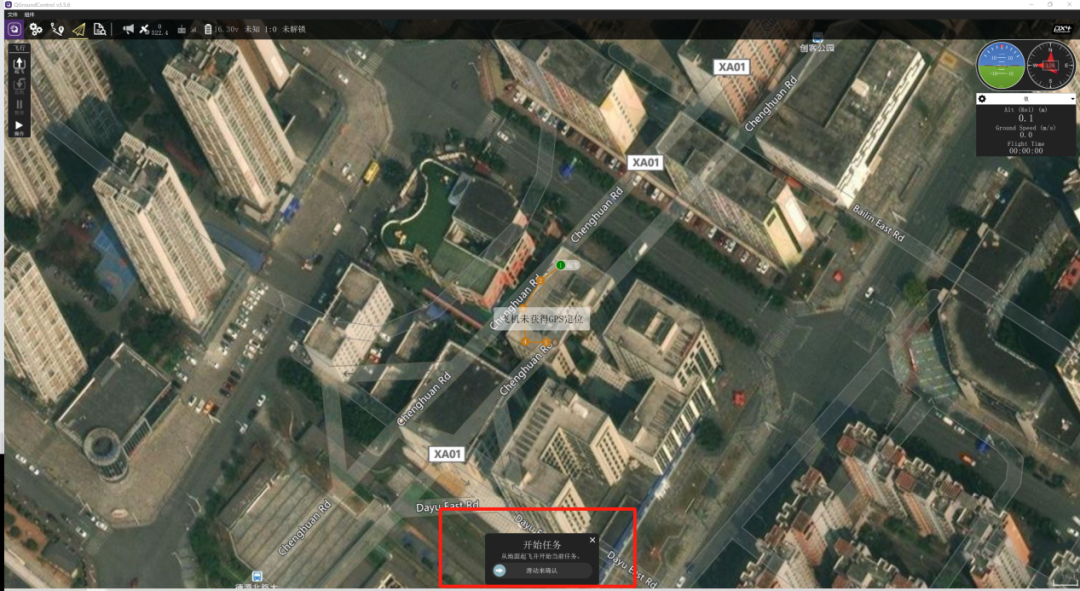
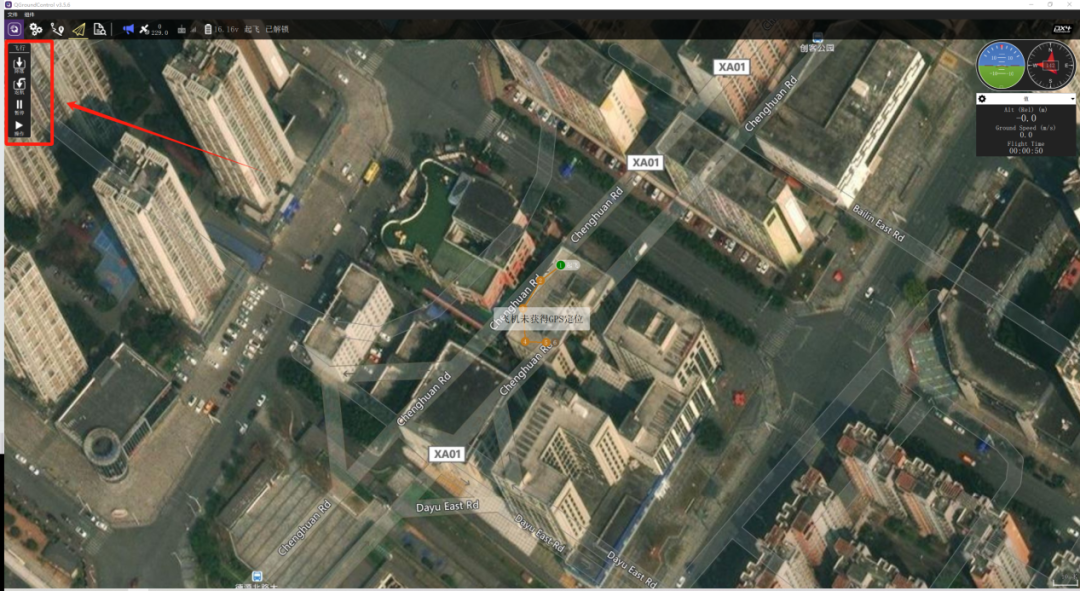
7、解锁并开始任务
在确认一切准备就绪后,您可以解锁并开始飞行任务。在飞行过程中,您可以在需要时点击暂停任务,使无人机在空中悬停,等待下一步指令。此外,您也可以选择降落或返航,以确保整个飞行过程的安全。
到此,我们的航点飞行功能演示就成功了。如果您想看PX4或者 Ardupilot飞控系统的航点功能教学,欢迎给我们点赞留言,我们会根据大家的需求后续考虑制作相应的教程。


