R300升级款无人车开发平台,助力开发者快速上手、高效验证算法
R300升级款是一款科研无人车开发平台,旨在为无人车开发者提供快速上手开发和高效验证算法的解决方案。该平台集成了多款无人车底盘,包括履带式、四轮差速、阿克曼、麦克纳姆轮底盘等,以满足不同形式和配置的需求,并搭载了RTK定位系统、双目相机、深度相机和激光雷达等多种传感器,以满足开发者的科研需求。此外,平台还提供了丰富的案例demo和使用教程,帮助开发团队跳过软硬件适配和系统搭建流程,直接进行核心研发。
产品介绍

R300升级款基于ROS+ArduPilot技术开发,可搭载RTK定位模块、图数传一体通信链路、飞控、激光雷达、双目相机、深度相机、工控机等,具备室外RTK厘米级定位、室内SLAM定位建图、地面站人机交互、自主避障、二维/三维建图等功能。适用于无人驾驶、物流无人车、服务型机器人、户外测量勘探、巡逻安防等多个科研方向。
硬件
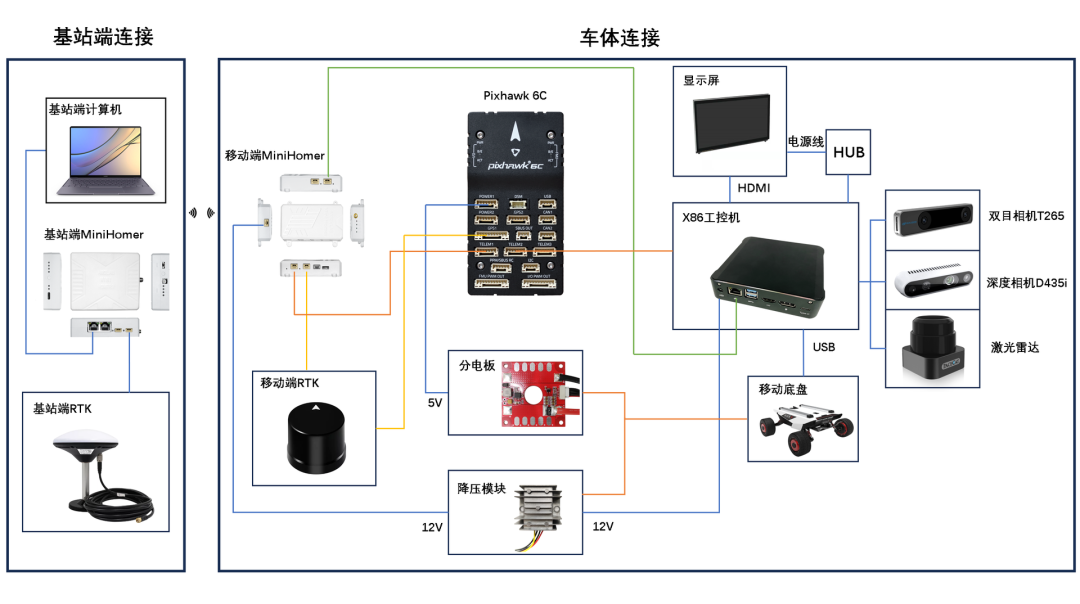
硬件方面采用了RTK定位模块、Mini Homer图数传一体通信链路、Pixhawk控制模块、LDS-50C激光雷达、Intel Realsense T265双目相机、Intel Realsense D435i深度相机、X86工控机以及松灵、煜禾森等无人车底盘。
软件
软件方面使用ROS机器人操作系统和Ardupilot开源自动驾驶系统,提供了丰富的功能包和地面站软件MissionPlanner,支持用户快速构建和调试机器人应用程序。
核心优势
多场景适用:具备室内室外两用的能力,满足不同场景的开发需求。
精确定位:采用室外RTK厘米级定位技术,提供高精度位置信息,基站版纠偏和4G千寻服务可选。
室内SLAM定位建图:实时生成室内环境的地图,为无人车的定位和导航提供准确的参考。
人机交互便利:地面站人机交互功能使操作员与无人车之间的交流更加便捷,可以实时获取和传递信息,提升操作效率。
自主导航和路径规划:通过航点规划功能,无人车可以根据预设航线自主导航,实现智能路径规划。
自主避障:利用多种传感器和算法,可以有效识别并避开障碍物,提高行驶的安全性和可靠性。
多维度感知和建图:支持二维和三维建图,实现对环境的准确感知和地图生成,为无人车提供更丰富的环境认知和决策支持。
个性化底盘:开发者可以根据自己的需求搭配底盘,适用于多种地形和环境条件。
功能展示



配置与参数

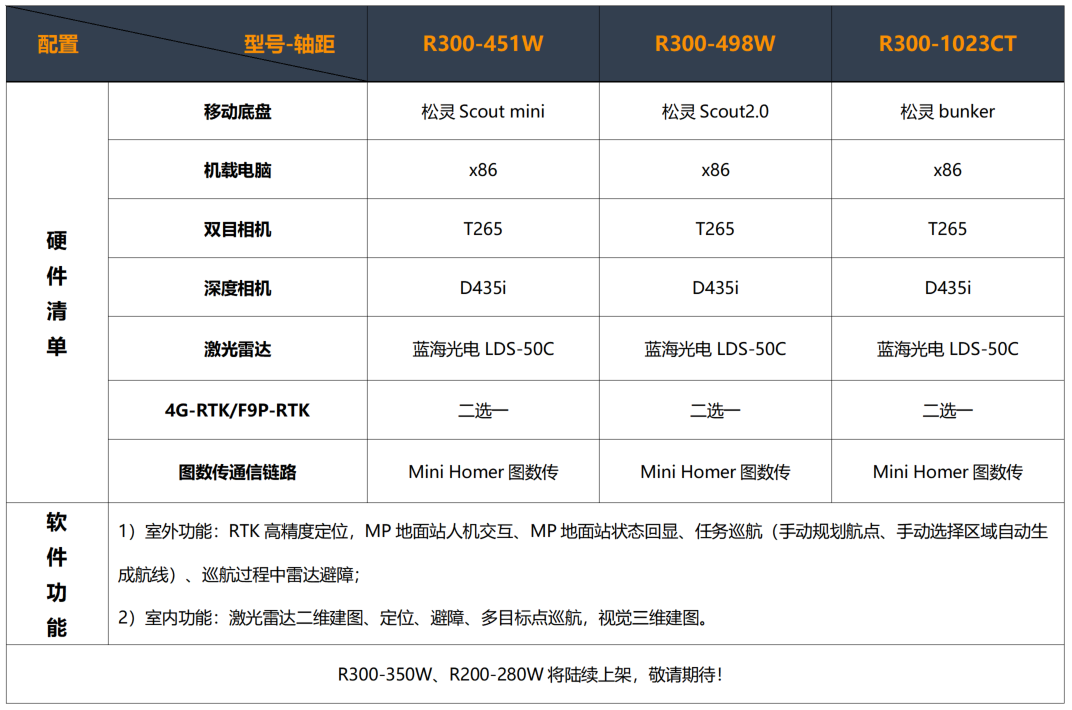
更多技术参数详见产品手册:https://docs.amovlab.com/Easycar-R300/#/
未来展望
R300升级款致力于无人车科研平台的开发,将来会开发更多的视觉功能,包括视觉跟随、视觉融合导航、视觉增强RTK,实现室内外定位无缝切换。R300升级款系列无人车可以基于ROS、Ardupilot、Gazebo接口以及搭载的多种传感器,开发部署并验证SLAM算法、路径规划算法、自主导航算法以及视觉识别算法,助力开发者快速进行算法落地实验。
若您对本产品感兴趣,可添加下方销售工程师微信红岸: 19141309462(微信同号),领取开学季限时9折优惠!
- End -
阿木实验室:为机器人研发提供开源软硬件工具和课程服务,让研发更高效!


